Friction Joint 2D
The Friction Joint 2D connects GameObjects controlled by Rigidbody 2D physics. The Friction Joint 2D reduces both the linear and angular velocities between the objects to zero (ie, it slows them down).
| 属性 | 功能 |
|---|---|
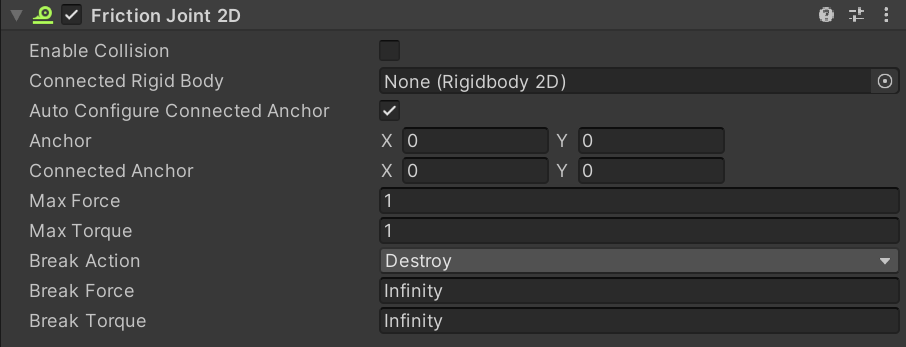
| Enable Collision | Enable this property to enable collisions between the two connected GameObjects. |
| Connected Rigid Body | Specify the other object this joint connects to. Leave this as None to have the other end of the joint fixed at a point in space defined by the Connected Anchor property. Select the circle icon to the right to view a list of GameObjects to connect to. |
| Auto Configure Connected Anchor | Enable this property to automatically set the anchor location for the other object this joint connects to. You do not need to enter coordinates for the Connected Anchor property if you enable this property. |
| Anchor | Define where (in terms of x, y-coordinates on the Rigidbody 2D) the end point of the joint connects to this GameObject. |
| Connected Anchor | Define where (in terms of x, y-coordinates on the Rigidbody 2D) the end point of the joint connects to the other GameObject. |
| Max Force | Set the linear (or straight line) movement between joined GameObjects. A high value resists the linear movement between GameObjects. |
| Max Torque | Set the angular (or rotation) movement between joined GameObjects. A high value resists the rotation movement between GameObjects. |
| Break Action | Set the action taken when either the force or torque threshold is exceeded. |
| Break Force | Set the force threshold which if exceeded, will cause the joint to perform the selected Break Action. The default value is set to Infinity, which can never be exceeded and therefore the Break Action can never be taken while the threshold remains at this value. |
| Break Torque | Set the torque threshold which if exceeded, will cause the joint to perform the selected Break Action. The default value is set to Infinity, which can never be exceeded and therefore the Break Action can never be taken while the threshold remains at this value. |
Using this joint
Use the Friction Joint 2D to slow down movement between two points to a stop. This joint’s aim is to maintain a zero relative linear and angular offset between two points. Those two points can be two Rigidbody 2D components or a Rigidbody 2D component and a fixed position in the world. (Connect to a fixed position in the world by setting Connected Rigidbody to None).
Resistance
The joint applies linear force (Force) and angle force (Torque) to both Rigidbody 2D points. It uses a simulated motor that is pre-configured to have a low motor power (and so, low resistance). You can change the resistance to make it weaker or stronger.
强阻力:
- A high (1,000,000 is the highest) Max Force creates strong linear resistance. The Rigidbody 2D GameObjects won’t move in a line relative to each other very much.
- A high (1,000,000 is the highest) Max Torque creates strong angular resistance. The Rigidbody 2D GameObjects won’t move at an angle relative to each other very much.
弱阻力:
- A low Max Force creates weak linear resistance. The Rigidbody 2D GameObjects move easily in a line relative to each other.
- A low Max Torque creates weak angular resistance. The Rigidbody 2D GameObjects move easily at an angle relative to each other.
约束
2D 摩擦关节同时有两个约束:
- 将两个 2D 刚体上的两个锚点之间的相对线速度保持为零
- 将两个 2D 刚体上的两个锚点之间的相对角速度保持为零
使用此关节可以构建需要有相互摩擦的物理游戏对象。这些阻力可以阻碍线性运动和/或角运动。例如:
- 一个平台可旋转,但会抵抗施加的力,使玩家很难但可以移动此平台。
- A ball that resists linear movement. The ball’s friction is related to the GameObject’s velocity and not to any collisions. It acts like the Linear Drag and Angular Drag which is set in Rigidbody 2D. The difference is that Friction Joint 2D has the option of maximum Force and Torque settings.)
其他资源
- Refer to Joints 2D for more information about other 2D Joints.
FrictionJoint2D