Area Effector 2D
El Area Effector 2D aplica fuerzas dentro de un área definida por los Colliders 2Ds adjuntos cuando otro (objetivo) Collider 2D entra en contacto con el Effector 2D. Usted puede configurar la fuerza en cualquier ángulo con una magnitud específica y una variación aleatoria en esa magnitud. Usted puede también aplicar fuerzas de fricción lineales y angulares para disminuir los Rigidbody 2Ds.
Los Collider 2Ds que usted utiliza con el Area Effector 2D típicamente se configuraría como triggers, para que otros Collider 2Ds se puedan sobreponer para tener una fuerza aplicada. Los no-triggers también funcionarán, pero las fuerzas solamente se aplicarán cuando los Colliders 2Ds entran en contacto con ellos.
Propiedades
| Propiedad: | Función: |
|---|---|
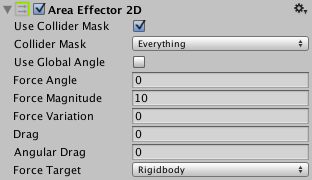
| Use Collider Mask | Marque para habilitar el uso de la propiedad Collider Mask? Si esto no está habilitado, la Global Collision Matrix (matriz de colisión global) será utilizada como la predeterminada para todos los Collider 2Ds. |
| Collider Mask | La mask utilizada para seleccionar Layers especificas para que interactúe con el Area Effector 2D. |
| Use Global Angle | Marque esto para definir la Force Angle como un ángulo global (espacio del mundo). Si esto no está marcado, la Force Angle se considera un ángulo local por el motor de física. |
| Force Angle | El ángulo de la fuerza a aplicar. |
| Force Magnitude | La magnitud de la fuerza a ser aplicada. |
| Force Variation | La variación de la magnitud de la fuerza en ser aplicada. |
| Drag | El linear drag (fricción lineal) en ser aplicado al Rigidbody 2Ds. |
| Angular Drag | El angular drag (fricción angular) en ser aplicado al Rigidbody 2Ds. |
| Force Target | El punto en un GameObject objetivo dónde el Area Effector 2D aplica una fuerza. |
| Collider | El punto objetivo se define como la posición actual del Collider 2D. Aplicar una fuerza aquí puede generar torque (rotación) si el Collider 2D no está posicionado en el centro de masa. |
| Rigidbody | El punto objetivo se define como el centro de masa actual del Rigidbody 2D. Aplicar una fuerza aquí nunca generará torque (rotación). |