Relative Joint 2D
The Relative Joint 2D connects two GameObjects controlled by Rigidbody physics to maintain in a position based on each other’s location. Use this joint to keep two objects offset from each other, at a position and angle you decide.
Refer to Comparing Fixed and Relative joints 2D for the differences between Relative Joint2D and FixedJoint2D.
| プロパティ | 機能 |
|---|---|
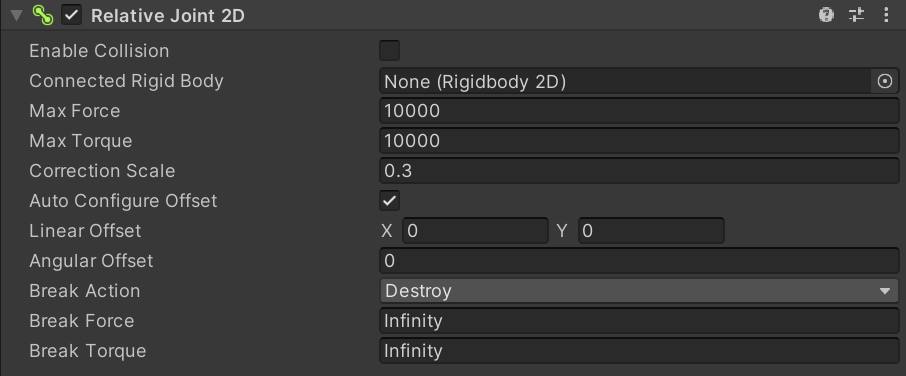
| Enable Collision | このプロパティを有効にすると、つながれた 2 つのゲームオブジェクトの衝突が可能になります。 |
| Connected Rigid Body | このジョイントと接続するもう 1 つのオブジェクトを指定します。ここを None にすると、もう一方の端が、Connected Anchor プロパティによって定義された空間の点に固定されます。入力欄の右側にある丸いアイコンを選択すると、接続先オブジェクトのリストを見ることができます。 |
| Max Force | Set the linear (or straight line) movement between joined GameObjects. A high value (up to 1,000) uses high force to maintain the offset. |
| Max Torque | Set the angular (or rotation) movement between joined GameObjects. A high value (up to 1000) uses high force to maintain the offset. |
| Correction Scale | Tweak the joint to correct its behaviorif required. Increasing the Max Force or Max Torque may affect the joint’s behavior such that the joint doesn’t reach its target, requiring you to correct it by adjusting this setting. The default setting is 0.3. |
| Auto Configure Offset | Enable this property to automatically set and maintain the distance and angle between the connected objects. You do not need to manually enter the Linear Offset and Angular Offset when you enable this property. |
| Linear Offset | Enter local space coordinates to specify and maintain the distance between the connected objects. |
| Angular Offset | Enter local space coordinates to specify and maintain the angle between the connected objects. |
| Break Action | 力またはトルクのしきい値を超えた時に実行されるアクションを設定します。 |
| Break Force | 力のしきい値を設定します。このしきい値を超えると、ジョイントが、選択された Break Action を実行します。デフォルト値は Infinity 設定されており、これは超えることができません。したがって、しきい値がこの値のままである場合は Break Action は実行できません。 |
| Break Torque | 力のしきい値を設定します。このしきい値を超えると、ジョイントが、選択された Break Action を実行します。デフォルト値は Infinity 設定されており、これは超えることができません。したがって、しきい値がこの値のままである場合は Break Action は実行できません。 |
このジョイントの使用
The aim of this joint is to maintain a relative linear and angular distance (offset) between two points. Those two points can be two Rigidbody2D components or a Rigidbody2D component and a fixed position in the world. Note: Connect to a fixed position in the world by setting Connected Rigidbody to None.
The joint applies a linear and angular (torque) force to both connected Rigidbody objects. It uses a simulated motor that is preconfigured to be quite powerful: It has a high Max Force and Max Torque limit. You can lower these values to make the motor less powerful motor or turn-off it off completely.
このジョイントには以下のとおり連立した2つの制限が用意されています。
- Maintain the specified linear offset between the two Rigidbody objects.
- Maintain the starting angular offset between the two Rigidbody objects.
このジョイントは以下のような挙動の物理オブジェクトを構築する必要がある場合に使用できます。
- お互いに近づけず、離れられないかのように距離を保ち続ける(離れる距離は指定できます。距離はリアルタイムで変更できます)
- お互いに特定の角度を維持するように回転します(維持する角度は決められます)
結合を柔軟にする必要がある場合に使用するかもしれません。例えば、プレーヤーに特別な銃のバッテリーがあり、バッテリーは銃を追従するスペースシューターゲームがあるとします。 Relative Joint を使えば、銃のバッテリーはわずかに遅れて追従し、後を残すことができる一方で、プレーヤーの回転から遅れることはありません。
Some uses may need a configurable force, such as: A game where the camera follows a player using a configurable force to keep track.
Fixed Joint 2D と Relative Joint 2D の比較
FixedJoint2D is spring type joint. RelativeJoint2D is a motor type joint with a maximum force and/or torque.
- Fixed Joint は直線、角度の相対的なずれを維持するのにスプリングを使い、 Relative Joint はモーターを使用します。ジョイントのスプリングかモーターを調節できます。
- The Fixed joint works with anchor points (it’s derived from script AnchoredJoint2D): It maintains the relative linear and angular offset between the anchors. The Relative joint doesn’t have anchor points (it’s derived directly from script Joint2D).
- Relative Joint は直線、角度的な相対的ずれを瞬時に修正することができます。 Fixed Joint にはできません。
その他の参考資料
- 他の 2D ジョイントに関する詳細は、2D ジョイント を参照してください。
RelativeJoint2D