Gyroscope
class in UnityEngine
Description
Интерфейс для работы с гироскопом.
Use this class to access the gyroscope. The example script below shows how the Gyroscope class can be used to view the orientation in space of the device.
Underlying sensors used for data population:
Android: Gravity, Linear Acceleration, Rotation Vector. More information.
iOS: Gyroscope, Device-Motion. More information.
// Create a cube with camera vector names on the faces. // Allow the device to show named faces as it is oriented.
using UnityEngine;
public class ExampleScript : MonoBehaviour { // Faces for 6 sides of the cube private GameObject[] quads = new GameObject[6];
// Textures for each quad, should be +X, +Y etc // with appropriate colors, red, green, blue, etc public Texture[] labels;
void Start() { // make camera solid colour and based at the origin GetComponent<Camera>().backgroundColor = new Color(49.0f / 255.0f, 77.0f / 255.0f, 121.0f / 255.0f); GetComponent<Camera>().transform.position = new Vector3(0, 0, 0); GetComponent<Camera>().clearFlags = CameraClearFlags.SolidColor;
// create the six quads forming the sides of a cube GameObject quad = GameObject.CreatePrimitive(PrimitiveType.Quad);
quads[0] = createQuad(quad, new Vector3(1, 0, 0), new Vector3(0, 90, 0), "plus x", new Color(0.90f, 0.10f, 0.10f, 1), labels[0]); quads[1] = createQuad(quad, new Vector3(0, 1, 0), new Vector3(-90, 0, 0), "plus y", new Color(0.10f, 0.90f, 0.10f, 1), labels[1]); quads[2] = createQuad(quad, new Vector3(0, 0, 1), new Vector3(0, 0, 0), "plus z", new Color(0.10f, 0.10f, 0.90f, 1), labels[2]); quads[3] = createQuad(quad, new Vector3(-1, 0, 0), new Vector3(0, -90, 0), "neg x", new Color(0.90f, 0.50f, 0.50f, 1), labels[3]); quads[4] = createQuad(quad, new Vector3(0, -1, 0), new Vector3(90, 0, 0), "neg y", new Color(0.50f, 0.90f, 0.50f, 1), labels[4]); quads[5] = createQuad(quad, new Vector3(0, 0, -1), new Vector3(0, 180, 0), "neg z", new Color(0.50f, 0.50f, 0.90f, 1), labels[5]);
GameObject.Destroy(quad); }
// make a quad for one side of the cube GameObject createQuad(GameObject quad, Vector3 pos, Vector3 rot, string name, Color col, Texture t) { Quaternion quat = Quaternion.Euler(rot); GameObject GO = Instantiate(quad, pos, quat); GO.name = name; GO.GetComponent<Renderer>().material.color = col; GO.GetComponent<Renderer>().material.mainTexture = t; GO.transform.localScale += new Vector3(0.25f, 0.25f, 0.25f); return GO; }
protected void Update() { GyroModifyCamera(); }
protected void OnGUI() { GUI.skin.label.fontSize = Screen.width / 40;
GUILayout.Label("Orientation: " + Screen.orientation); GUILayout.Label("input.gyro.attitude: " + Input.gyro.attitude); GUILayout.Label("iphone width/font: " + Screen.width + " : " + GUI.skin.label.fontSize); }
/********************************************/
// The Gyroscope is right-handed. Unity is left handed. // Make the necessary change to the camera. void GyroModifyCamera() { transform.rotation = GyroToUnity(Input.gyro.attitude); }
private static Quaternion GyroToUnity(Quaternion q) { return new Quaternion(q.x, q.y, -q.z, -q.w); } }
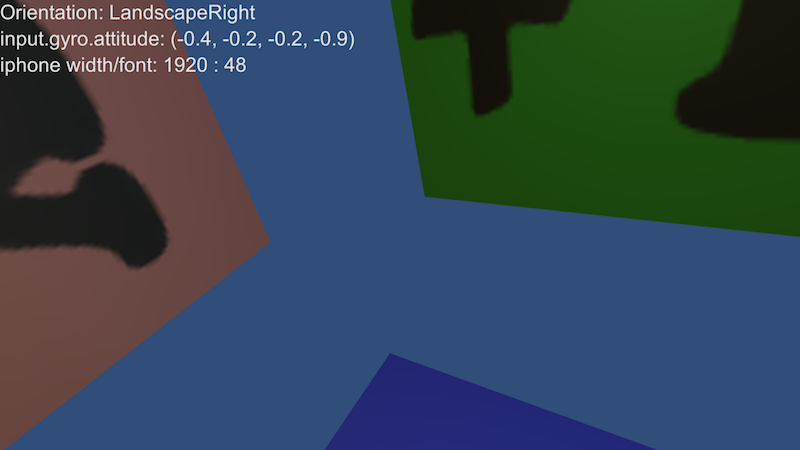
iOS Screen-shot showing +Z, +Y and -X.
Variables
| attitude | Возвращает положение устройства в пространстве. |
| enabled | Задает или возвращает статус работы этого гироскопа. |
| gravity | Возвращает вектор ускорения силы тяжести, выраженный в системе координат устройства. |
| rotationRate | Возвращает скорость вращения, которая была определена с помощью гироскопа устройства. |
| rotationRateUnbiased | Возвращает объективную скорость вращения, которая была определена с помощью гироскопа устройства. |
| updateInterval | Задает или возвращает время обновления гироскопа. |
| userAcceleration | Возвращает ускорение, которое пользователь задал устройству. |