手册
Version:
2017.4
- Unity User Manual (2017.4)
- 在 Unity 中操作
- 准备开始
- 资源工作流程
- 主要窗口
- 创建游戏玩法
- 编辑器功能
- 高级开发
- Editor 高级主题
- 许可证和激活
- 升级指南
- 2D
- 图形
- 图形概述
- 光照
- 摄像机
- 材质、着色器和纹理
- 纹理
- 创建和使用材质
- 标准着色器
- 标准粒子着色器
- 基于物理的渲染材质验证器
- 通过脚本访问和修改材质参数
- 编写着色器
- 旧版着色器
- 内置着色器的用途和性能
- 普通着色器系列
- 透明着色器系列
- 透明镂空着色器系列
- 自发光着色器系列
- 反光着色器系列
- 反射顶点光照 (Reflective Vertex-Lit)
- 反光漫射 (Reflective Diffuse)
- 反光镜面反射 (Reflective Specular)
- 反光凹凸漫射 (Reflective Bumped Diffuse)
- 反光凹凸镜面反射 (Reflective Bumped Specular)
- 反光视差漫射 (Reflective Parallax Diffuse)
- 反光视差镜面反射 (Reflective Parallax Specular)
- 反光法线贴图无光照 (Reflective Normal Mapped Unlit)
- 反光法线贴图顶点光照 (Reflective Normal mapped Vertex-lit)
- 视频概述
- 地形引擎
- Tree Editor(树编辑器)
- 粒子系统
- 后期处理概述
- 反射探针
- 高级渲染功能
- Procedural Materials
- 程序化网格几何体
- 优化图形性能
- 层
- 图形参考
- 摄像机参考
- 着色器参考
- 粒子系统参考
- 粒子系统 (Particle System)
- 粒子系统模块
- 粒子系统 (Particle System) 主模块
- Emission 模块
- 粒子系统 Shape 模块
- Velocity over Lifetime 模块
- Noise 模块
- Limit Velocity Over Lifetime 模块
- Inherit Velocity 模块
- Force Over Lifetime 模块
- Color Over Lifetime 模块
- Color By Speed 模块
- Size over Lifetime 模块
- Size by Speed 模块
- Rotation Over Lifetime 模块
- Rotation By Speed 模块
- External Forces 模块
- Collision 模块
- Triggers 模块
- Sub Emitters 模块
- Texture Sheet Animation 模块
- Lights 模块
- Trails 模块
- Custom Data 模块
- Renderer 模块
- 粒子系统(旧版,3.5 版之前)
- 视觉效果参考
- 网格组件
- 纹理组件
- 渲染组件
- 渲染管线详细信息
- 图形操作方法
- 图形教程
- 图形概述
- 物理系统
- 脚本
- 多玩家和联网
- 音频
- 动画
- 动画系统概述
- 动画剪辑
- Animator Controllers
- 重定向人形动画
- Performance and Optimization
- Animation Reference
- Animation HOWTOs
- Playables API
- 动画术语表
- 时间轴
- UI
- 导航和寻路
- Unity 服务
- 设置项目启用 Unity 服务
- Unity Organizations
- Unity Ads
- Unity Analytics
- Unity Cloud Build
- Automated Build Generation
- 支持的平台
- 支持的 Unity 版本
- 版本控制系统
- 使用 Unity 开发者控制面板 (Developer Dashboard) 对 Unity Cloud Build 进行 Git 配置
- 使用 Unity Editor 对 Unity Cloud Build 进行 Git 配置
- 使用 Unity 开发者控制面板 (Developer Dashboard) 对 Unity Cloud Build 进行 Mercurial 配置
- 使用 Unity Editor 对 Unity Cloud Build 进行 Mercurial 配置
- 将 Apache Subversion (SVN) 用于 Unity Cloud Build
- 使用 Unity 开发者控制面板 (Developer Dashboard) 对 Unity Cloud Build 进行 Perforce 配置
- 使用 Unity Editor 对 Unity Cloud Build 进行 Perforce 配置
- 发布到 iOS
- 高级选项
- 编译清单
- Cloud Build REST API
- Unity IAP
- 设置 Unity IAP
- 跨平台指南
- 应用商店指南
- 实现应用商店
- 内购推荐 (IAP Promo)
- Unity Collaborate
- Unity Performance Reporting
- Unity Integrations
- Multiplayer 服务
- XR
- 开源代码仓库
- Asset Store 发布
- 特定于平台的信息
- 独立平台
- macOS
- Apple TV
- WebGL
- iOS
- Android
- Windows
- Web 播放器
- 移动平台开发者检查清单
- 实验性
- 旧版主题
- 最佳实践指南
- 专家指南
- Unity 2017 中的新功能
反向动力学
大多数动画是通过将骨架中的关节角度旋转到预定值来生成的。子关节的位置根据父关节的旋转而改变,因此可从父关节包含的各个关节的角度和相对位置来确定关节链的终点。这种构建骨架的方法被称为正向动力学。
然而,从相反视角看待构建关节的任务通常很有用:在空间中选择一个位置后,向后找到一种有效的关节定位方法,使终点落在该位置。如果您希望角色触摸位于用户选定位置的对象或让角色的双脚牢牢扎入不平坦的表面,这种方法可能很有用。此方法称为__反向动力学__ (IK),可在 Mecanim 中用于_已正确配置的任何人形Avatar骨骼。
要为角色设置 IK,通常要在场景周围放置与角色互动的对象,然后通过脚本(尤其是,诸如 SetIKPositionWeight、 SetIKRotationWeight、 SetIKPosition、 SetIKRotation、 SetLookAtPosition、 bodyPosition、 bodyRotation之类的 Animator 函数)来设置 IK
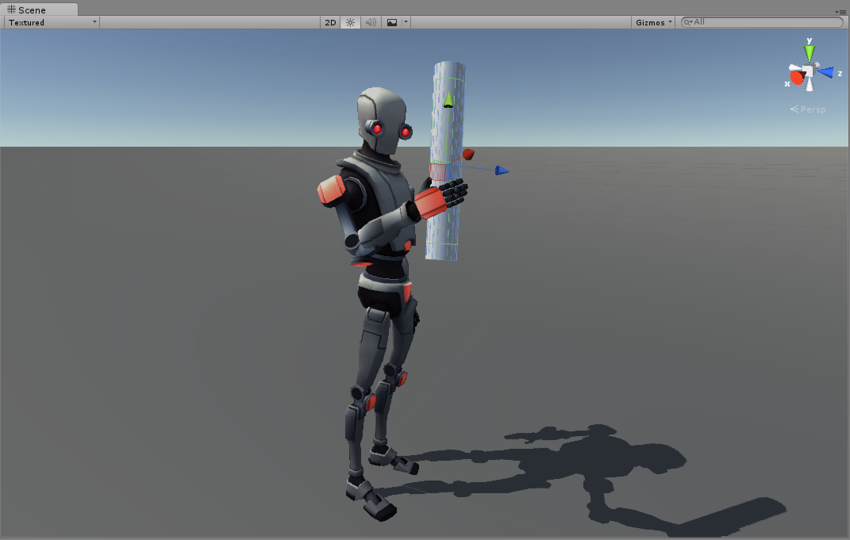
在上图中,我们展示了一个抓住圆柱形物体的角色。我们如何将其实现?
我们从拥有有效的 Avatar角色开始。
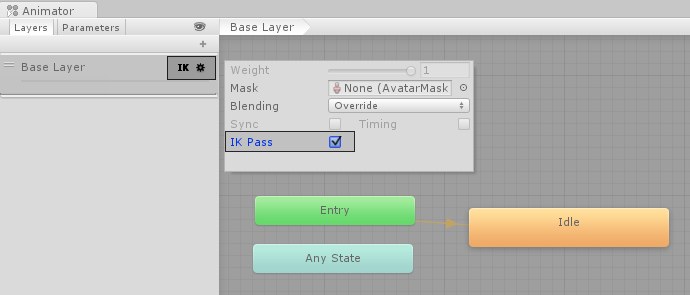
下一步创建 Animator Controller,使其包含该角色的至少一个动画。然后,在 Animator 窗口的 Layers 面板中,单击层的齿轮设置图标,并选中弹出框中的 IK Pass 复选框。
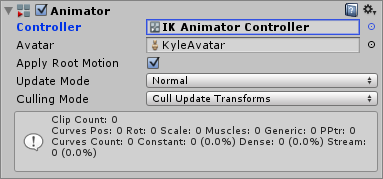
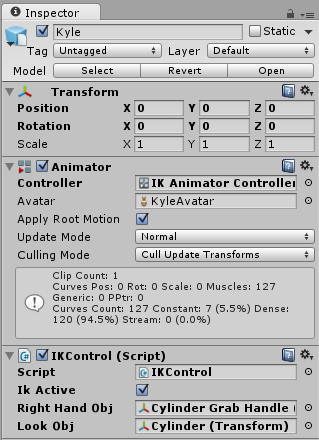
确保已将 Animator Controller 分配给角色的 Animator 组件 (Animator Component):
接下来,为其附加一个实际处理 IK 的脚本,将此脚本命名为 IKControl。此脚本为角色的右手设置 IK 目标,并设置角色的观察位置以使其观看所持物体:
using UnityEngine;
using System;
using System.Collections;
[RequireComponent(typeof(Animator))]
public class IKControl : MonoBehaviour {
protected Animator animator;
public bool ikActive = false;
public Transform rightHandObj = null;
public Transform lookObj = null;
void Start ()
{
animator = GetComponent<Animator>();
}
// 用于计算 IK 的回调
void OnAnimatorIK()
{
if(animator) {
// 如果 IK 处于活动状态,请将位置和旋转直接设置为目标。
if(ikActive) {
// 设置观察目标位置(如果已分配)
if(lookObj != null) {
animator.SetLookAtWeight(1);
animator.SetLookAtPosition(lookObj.position);
}
// 设置右手目标位置和旋转(如果已分配)
if(rightHandObj != null) {
animator.SetIKPositionWeight(AvatarIKGoal.RightHand,1);
animator.SetIKRotationWeight(AvatarIKGoal.RightHand,1);
animator.SetIKPosition(AvatarIKGoal.RightHand,rightHandObj.position);
animator.SetIKRotation(AvatarIKGoal.RightHand,rightHandObj.rotation);
}
}
// 如果 IK 未处于活动状态,请将手和头部的位置和旋转设置回原始位置
else {
animator.SetIKPositionWeight(AvatarIKGoal.RightHand,0);
animator.SetIKRotationWeight(AvatarIKGoal.RightHand,0);
animator.SetLookAtWeight(0);
}
}
}
}
因为我们不打算让角色的手伸到物体内部中心(圆柱的轴心点),所以放置一个空的子对象(在此情况下,命名为“Cylinder Grab Handle”(圆柱抓握把手)),确保手应该放在圆柱上,并将其相应旋转。然后,这只手瞄准此子对象。
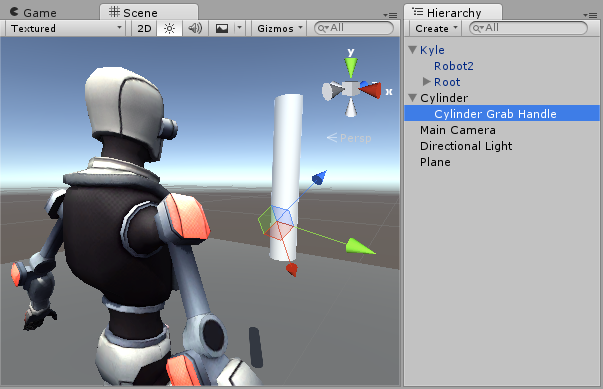
然后,应将此“抓握把手”游戏对象分配为 IKControl 脚本的“Right Hand Obj”属性
在此示例中,我们把观察目标设置为圆柱本身,因此即使把手靠近底部,角色也会直接看向物体的中心。
进入播放模式,然后应该会看到 IK 变为现实。单击 IKActive 复选框时,观察角色抓取和放开物体,并尝试在播放模式中四处移动圆柱以观察手臂和手跟随物体移动的情况。
Copyright © 2018 Unity Technologies. Publication 2017.4