手册
Version:
2019.1
- Unity User Manual (2019.1)
- 包
- Verified and Preview packages
- 2D Animation
- 2D IK
- 2D Pixel Perfect
- 2D PSD Importer
- 2D SpriteShape
- Adaptive Performance
- Addressables
- Ads IAP Mediation Adaptor
- Advertisement
- AI Planner
- Alembic
- Analytics Library
- Android Logcat
- Animation Rigging
- AP Samsung Android
- AR Foundation
- ARCore XR Plugin
- ARKit Face Tracking
- ARKit XR Plugin
- Asset Bundle Browser
- Barracuda
- Build Report Inspector
- Burst
- Cinemachine
- Collections
- Core RP Library
- DOTS Android Platform
- DOTS Linux Platform
- DOTS macOS Platform
- DOTS Platforms
- DOTS Web Platform
- DOTS Windows Platform
- Editor Coroutines
- Entities
- FBX Exporter
- Film and TV Toolbox
- Game Foundation
- Google Resonance Audio
- Google VR Android
- Google VR iOS
- High Definition RP
- Hybrid Renderer
- Immediate Window
- In App Purchasing
- Input System
- Jobs
- Lightweight RP
- Mathematics
- 内存性能分析器 (Memory Profiler)
- Mobile Notifications
- Mono Cecil
- Multiplayer HLAPI
- Oculus Android
- Oculus Desktop
- OpenVR (Desktop)
- Package Validation Suite
- PlayableGraph Visualizer
- Polybrush
- Post Processing
- ProBuilder
- Profile Analyzer
- ProGrids
- Quick Search
- Remote Config
- Scriptable Build Pipeline
- Shader Graph
- Share WebGL Game
- Terrain Tools
- TextMesh Pro
- Unity AOV Recorder
- Unity Collaborate
- Unity Distribution Portal
- Unity Physics
- Unity Recorder
- Unity Reflect
- Unity Render Streaming
- Unity User Reporting
- USD
- Vector Graphics
- Visual Effect Graph
- WebRTC
- Windows Mixed Reality
- Xiaomi SDK
- XR Legacy Input Helpers
- XR SDK Management
- 内置包
- AI
- 动画
- Asset Bundle
- Audio
- 布料
- Director
- Image Conversion
- IMGUI
- JSONSerialize
- Package Manager UI
- Particle System
- 物理 (Physics)
- Physics 2D
- Screen Capture
- Terrain
- Terrain Physics
- Tilemap
- UI
- UIElements
- Umbra
- Unity Analytics
- Unity Timeline
- Unity Web Request
- Unity Web Request Asset Bundle
- Unity Web Request Audio
- Unity Web Request Texture
- Unity Web Request WWW
- Vehicles
- Video
- VR
- Wind
- XR
- 按关键字排列的包
- Working with the Package Manager
- 创建自定义包
- Verified and Preview packages
- 在 Unity 中操作
- 安装 Unity
- 准备开始
- Asset Workflow
- The Main Windows
- 创建游戏玩法
- 编辑器功能
- 高级开发
- Editor 高级主题
- 升级指南
- 导入
- 2D
- 图形
- 图形概述
- 光照
- 摄像机
- 材质、着色器和纹理
- 纹理
- 创建和使用材质
- 标准着色器
- 标准粒子着色器
- 基于物理的渲染材质验证器
- 通过脚本访问和修改材质参数
- 编写着色器
- 旧版着色器
- 内置着色器的用途和性能
- 普通着色器系列
- 透明着色器系列
- 透明镂空着色器系列
- 自发光着色器系列
- 反光着色器系列
- 反射顶点光照 (Reflective Vertex-Lit)
- 反光漫射 (Reflective Diffuse)
- 反光镜面反射 (Reflective Specular)
- 反光凹凸漫射 (Reflective Bumped Diffuse)
- 反光凹凸镜面反射 (Reflective Bumped Specular)
- 反光视差漫射 (Reflective Parallax Diffuse)
- 反光视差镜面反射 (Reflective Parallax Specular)
- 反光法线贴图无光照 (Reflective Normal Mapped Unlit)
- 反光法线贴图顶点光照 (Reflective Normal mapped Vertex-lit)
- 视频概述
- 地形引擎
- Tree Editor(树编辑器)
- 粒子系统
- 后期处理概述
- 高级渲染功能
- 程序化网格几何体
- 优化图形性能
- 层
- 图形参考
- 摄像机参考
- 着色器参考
- 粒子系统参考
- 粒子系统 (Particle System)
- 粒子系统模块
- 粒子系统 (Particle System) 主模块
- Emission 模块
- Shape 模块
- Velocity over Lifetime 模块
- Noise 模块
- Limit Velocity Over Lifetime 模块
- Inherit Velocity 模块
- Force Over Lifetime 模块
- Color Over Lifetime 模块
- Color By Speed 模块
- Size over Lifetime 模块
- Size by Speed 模块
- Rotation Over Lifetime 模块
- Rotation By Speed 模块
- External Forces 模块
- Collision 模块
- Triggers 模块
- Sub Emitters 模块
- Texture Sheet Animation 模块
- Lights 模块
- Trails 模块
- Custom Data 模块
- Renderer 模块
- 粒子系统力场 (Particle System Force Field)
- 粒子系统(旧版,3.5 版之前)
- 视觉效果参考
- 网格组件
- 纹理组件
- 渲染组件
- 渲染管线详细信息
- 图形操作方法
- 图形教程
- 可编程渲染管线
- 图形概述
- 物理系统
- 脚本
- 多玩家和联网
- 音频
- 动画
- 时间轴
- 时间轴概述
- Using the Timeline window
- Timeline window
- Timeline properties in the Inspector window
- Playable Director 组件
- 时间轴术语表
- 用户界面 (UI)
- 导航和寻路
- Unity 服务
- 设置项目启用 Unity 服务
- Unity Organizations
- Unity Ads
- Unity Analytics
- Unity Cloud Build
- Automated Build Generation
- 支持的平台
- 支持的 Unity 版本
- 版本控制系统
- 使用 Unity 开发者控制面板 (Developer Dashboard) 对 Unity Cloud Build 进行 Git 配置
- 使用 Unity Editor 对 Unity Cloud Build 进行 Git 配置
- 使用 Unity 开发者控制面板 (Developer Dashboard) 对 Unity Cloud Build 进行 Mercurial 配置
- 使用 Unity Editor 对 Unity Cloud Build 进行 Mercurial 配置
- 将 Apache Subversion (SVN) 用于 Unity Cloud Build
- 使用 Unity 开发者控制面板 (Developer Dashboard) 对 Unity Cloud Build 进行 Perforce 配置
- 使用 Unity Editor 对 Unity Cloud Build 进行 Perforce 配置
- 发布到 iOS
- 高级选项
- 编译清单
- Cloud Build REST API
- Unity IAP
- 设置 Unity IAP
- 跨平台指南
- 应用商店指南
- 实现应用商店
- 内购推荐 (IAP Promo)
- Unity Collaborate
- Unity Cloud Diagnostics
- Unity Integrations
- Multiplayer 服务
- XR
- 开源代码仓库
- Asset Store 发布
- 特定于平台的信息
- 独立平台
- macOS
- Apple TV
- WebGL
- iOS
- Android
- Windows
- 移动平台开发者检查清单
- 实验性
- 旧版主题
- 最佳实践指南
- 专家指南
- Unity 2019.1 中的新功能
- 术语表
- Unity User Manual (2019.1)
- 物理系统
- 物理系统概述
- 连续碰撞检测 (CCD)
连续碰撞检测 (CCD)
CCD 确保快速移动的物体与对象碰撞,而不会穿过这些对象。Unity 提供以下 CCD 方法:
要使用基于扫掠的 CCD,请在 Inspector 窗口中选择一个刚体 (RigidBody),并将 Collision Detection 设置为 Continuous 或 Continuous Dynamic。要使用推断性 CCD,请将 Collision Detection 设置为 Continuous Speculative。
基于扫掠的 CCD
基于扫掠的 CCD 采用撞击时间 (TOI) 算法,通过扫掠对象的前向轨迹来计算对象的潜在碰撞(采用对象的当前速度)。如果沿对象移动方向有接触,该算法会计算撞击时间并移动对象直至达到该时间。该算法可从该时间开始执行子步骤,即计算 TOI 之后的速度,然后重新扫掠,代价是需要经历更多的 CPU 周期。
然而,因为此方法依赖于线性扫掠,所以会忽略物体的角运动,这在对象迅速旋转时会引起穿隧效应。例如,弹球机上的弹球杆固定在一端,围绕一个固定点旋转。弹球杆只做角运动,不做线性运动。因此,很容易打不中弹球:
此方法的另一个问题是性能问题。如果附近有大量启用 CCD 的高速对象,CCD 的开销将由于进行额外的扫掠而很快增加,因此物理引擎不得不执行更多的 CCD 子步骤。
推断性 CCD
推断性 CCD 的工作原理是基于对象的线性运动和角运动增大一个对象的粗筛阶段轴对齐最小包围盒 (AABB)。该算法是一种推测性的算法,因为会选取下一物理步骤中的所有潜在触点。然后将所有触点送入解算器,因此可确保满足所有的触点约束,使对象不会穿过任何碰撞。
下图显示了从 t0 开始移动的球体如何获得预期的 t1 位置(如果其路径中没有墙)。通过使用目标姿势将 AABB 扩大,推测性算法选取与 n1 和 n2 法线之间的两个触点。然后,该算法告诉解算器遵循这些触点,使球体不会穿过墙壁。
基于当前速度并扩大的 AABB 有助于检测沿运动轨迹的所有潜在触点,使解算器能够防止对象穿过去。
推测性 CCD 的成本通常低于基于扫掠的方法,因为只在碰撞检测阶段(而不在求解和积分阶段)计算触点。此外,由于推测性 CCD 根据对象的线性运动和角运动来扩展粗筛阶段 AABB,因此能发现基于扫掠的 CCD 可能遗漏的触点。
但是,推测性 CCD 可能会导致幽灵碰撞;在这种碰撞中,对象的运动受到推测性触点的影响,而这是不应发生的。这是因为推测性 CCD 根据最近点算法收集所有潜在触点,所以触点法线不太准确。这通常会使高速对象沿着细分的碰撞特征滑动并跳起来,但不应该这样。例如,下图中,球体从 t0 开始向右水平移动,积分后的预测位置为 t1。扩大后的 AABB 与框形 b0 和 b1 重叠,而 CCD 在 c0 和 c1 产生两个推测性触点。由于推测性 CCD 使用最近点算法来生成触点,__c0__ 具有非常倾斜的法线,因此解算器会将其视作斜坡。
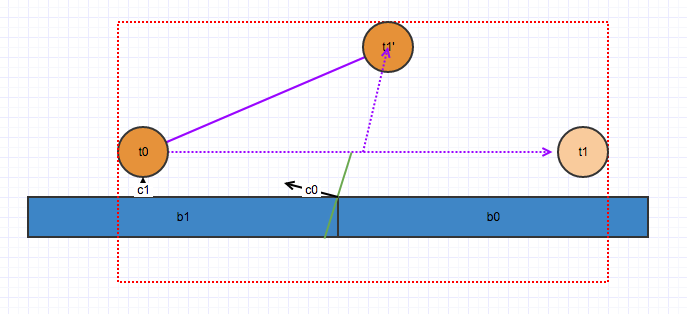
这种非常倾斜的法线导致 t1 在积分后向上跳动,而不是笔直向前移动:

推测性 CCD 还可能导致发生穿隧,因为只会在碰撞检测阶段计算推测性触点。在触点求解过程中,如果一个对象从解算器获得太多能量,在积分后,其最终位置可能在初始扩大的 AABB 之外。如果在紧邻 AABB 的外部发生碰撞,对象会从右边穿出。
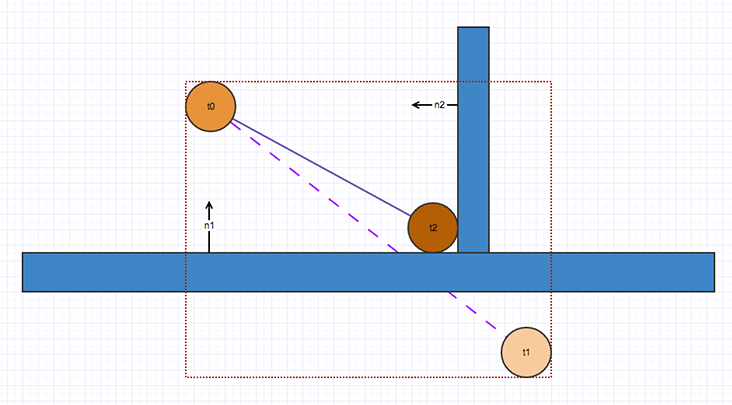
例如,下图显示了球体从 t0 向左移动,而球杆顺时针旋转。如果球体从撞击中获得太多能量,最终可能离开扩大的 AABB(红点矩形),落在 t1 处。如果在紧邻 AABB 的外部发生碰撞(如下面的蓝色框所示),球体最终可能会从右边穿出。这是因为解算器只计算扩大的 AABB 的内部触点,在求解和积分阶段不会执行碰撞检测。

版权所有 © 2019 Unity Technologies. Publication 2019.1