매뉴얼
Version:
2021.1
- Unity User Manual 2021.1
- Unity 2021.1의 새로운 기능
- 패키지
- 릴리스된 패키지
- 2D 애니메이션
- 2D 픽셀 퍼펙트
- 2D PSD 임포터
- 2D SpriteShape
- 2D 타일맵 엑스트라
- 어댑티브 퍼포먼스
- 어드레서블
- 광고
- Alembic
- 분석 라이브러리
- Android 로그캣
- 애니메이션 리깅
- AR 파운데이션
- ARCore XR 플러그인
- ARKit 얼굴 추적
- ARKit XR 플러그인
- 버스트
- 시네머신
- 코드 커버리지
- 에디터 코루틴
- FBX 익스포터
- 인앱 구매
- 입력 시스템
- iOS 14 광고 지원
- Jetbrains Rider 에디터
- Magic Leap XR 플러그인
- ML 에이전트
- 모바일 알림
- Oculus XR 플러그인
- OpenXR 플러그인
- Polybrush
- 포스트 프로세싱
- ProBuilder
- 프로파일 분석기
- 레코더
- 원격 설정
- 스크립터블 빌드 파이프라인
- 테스트 프레임워크
- TextMeshPro
- 타임라인
- Unity 퍼블리싱 포털
- 버전 관리
- 비주얼 스크립팅
- Visual Studio 코드 에디터
- Visual Studio 에디터
- Windows XR 플러그인
- XR 플러그인 관리
- 릴리스 후보(RC)
- 사전 릴리스 패키지
- 코어 패키지
- 빌트인 패키지
- 실험 단계 패키지
- 키워드별 패키지
- Unity의 패키지 관리자
- 커스텀 패키지 생성
- 릴리스된 패키지
- Unity에서 작업 수행
- Unity 설치
- Unity 업그레이드
- Unity 인터페이스
- 퀵스타트 가이드
- 게임플레이 생성
- 에디터 기능
- 분석
- 에셋 워크플로
- 입력
- 2D
- 그래픽스
- 렌더 파이프라인
- 카메라
- 포스트 프로세싱
- 조명
- 모델(Models)
- 메시
- 텍스처
- 셰이더
- 셰이더의 핵심 개념
- 빌트인 셰이더
- 셰이더 그래프 사용
- 셰이더 작성
- 셰이더 작성 개요
- ShaderLab
- ShaderLab: 셰이더 오브젝트 정의
- ShaderLab: 서브셰이더 정의
- ShaderLab: 패스 정의하기
- ShaderLab: 셰이더 프로그램 추가
- ShaderLab: 커맨드
- ShaderLab: 카테고리 블록으로 커맨드 그룹화하기
- ShaderLab 커맨드: AlphaToMask
- ShaderLab 커맨드: Blend
- ShaderLab 커맨드: BlendOp
- ShaderLab 커맨드: ColorMask
- ShaderLab 커맨드: Conservative
- ShaderLab 커맨드: Cull
- ShaderLab 커맨드: Offset
- ShaderLab 커맨드: Stencil
- ShaderLab 커맨드: UsePass
- ShaderLab 커맨드: GrabPass
- ShaderLab 커맨드: ZClip
- ShaderLab 커맨드: ZTest
- ShaderLab 커맨드: ZWrite
- ShaderLab 레거시 기능
- Unity의 HLSL
- Unity의 GLSL
- 예제 셰이더
- 표면 셰이더 작성
- 여러 그래픽스 API를 위한 셰이더 작성
- 셰이더 성능 및 프로파일링
- 머티리얼
- 파티클 시스템
- 환경 생성
- 하늘
- 시각 효과 컴포넌트
- 컬러
- 그래픽스 API 지원
- 그래픽스 퍼포먼스 최적화
- 물리
- 스크립팅
- 멀티플레이어 및 네트워킹
- 네트워킹 개요
- 멀티플레이어 프로젝트 설정
- 네트워크 관리자 사용
- 네트워크 관리자 HUD 사용
- LAN 모드의 Network Manager HUD
- 매치메이커 모드의 Network Manager HUD
- 싱글 플레이어 게임을 Unity 멀티플레이어 게임으로 전환
- 디버깅 정보
- 멀티플레이어 고수준 API
- 멀티플레이어 컴포넌트 레퍼런스
- 멀티플레이어 클래스 레퍼런스
- 멀티플레이어 암호화 플러그인
- UnityWebRequest
- 오디오
- 동영상 개요
- 애니메이션
- 사용자 인터페이스(UI) 생성
- 내비게이션과 경로 탐색
- 내비게이션 개요
- 내비게이션 레퍼런스
- 내비게이션 작업 수행 방법
- Unity 서비스
- Unity 서비스를 위한 프로젝트 설정
- Unity 조직
- Unity 애즈
- Unity 애널리틱스
- Unity 클라우드 빌드
- Unity 클라우드 콘텐츠 제공
- Unity IAP
- Unity IAP 설정
- 크로스 플랫폼 가이드
- 스토어 가이드
- 스토어 구현
- Unity 콜라보레이트
- Unity 클라우드 다이어그노스틱
- Unity 통합
- 멀티플레이어 서비스
- Unity 퍼블리싱 포털
- XR
- 오픈 소스 저장소
- Unity의 에셋 스토어
- 플랫폼 개발
- 다른 애플리케이션에서 Unity as a Library 사용
- 딥 링크 활성화
- 스탠드얼론
- macOS
- Apple TV
- WebGL
- iOS
- Android
- Windows
- Unity를 Windows 및 UWP 애플리케이션에 통합
- Windows 일반
- 유니버설 Windows 플랫폼
- 알려진 문제
- Unity 검색
- 레거시 항목
- 용어집
- Unity User Manual 2021.1
- 물리
- 오브젝트 지향 프로젝트를 위한 3D 물리
- 연속 충돌 검사(CCD)
연속 충돌 검사(CCD)
CCD는 빠르게 움직이는 바디가 오브젝트를 지나치거나 통과하지 않고 충돌하도록 합니다. Unity는 다음의 CCD 메서드를 제공합니다.
스위핑 기반의 CCD를 사용하려면 인스펙터 창에서 RigidBody를 선택하고 Collision Detection 을 Continuous 또는 Continuous Dynamic 으로 설정합니다. 추측성 CCD의 경우 Collision Detection 을 Continuous Speculative 로 설정합니다.
스위핑 기반 CCD
스위핑 기반 CCD는 충돌 시점(TOI) 알고리즘을 사용하여 오브젝트의 현재 속도를 이용해 앞쪽 궤도를 스위핑함으로써 해당 오브젝트의 잠재 충돌을 계산합니다. 오브젝트의 이동 방향에 컨택트가 존재하는 경우 알고리즘은 충돌 시간을 계산하여 이 시간까지 오브젝트를 이동시킵니다. 알고리즘은 이 시간부터 TOI 이후의 속도를 계산한 다음 다시 스위핑하는 하위 단계를 수행할 수 있습니다. 단, 이 경우 CPU 사이클이 늘어납니다.
그러나 이 메서드는 리니어 스위핑에 의존하므로 바디의 각도 모션을 무시합니다. 이로 인해 오브젝트가 빠르게 회전하는 경우 터널링 효과가 발생할 수 있습니다. 한 쪽 끝이 고정된 상태로 고정된 포인트 주변을 회전하는 핀볼 기계의 플리퍼를 예로 들 수 있습니다. 플리퍼는 각도 모션만 수행하며 리니어 모션은 수행하지 않으므로, 핀볼과의 충돌이 빗나가기 쉽습니다.
이 메서드의 또 다른 문제는 성능입니다. 이 CCD로 속도가 빠른 오브젝트를 대량 처리하는 경우, 추가 스위핑 때문에 CCD 오버헤드가 빠른 속도로 증가하며 물리 엔진이 더 많은 CCD 하위 단계를 수행해야 합니다.
추측성 CCD
추측성 CCD는 오브젝트의 리니어 및 각도 모션을 기반으로 오브젝트의 넓은 페이즈 축에 정렬된 최소 경계 상자(AABB)를 늘리는 방식으로 작동합니다. 이 알고리즘이 ’추측성’으로 명명된 이유는 다음 물리 단계에서 접촉 가능한 모든 컨택트를 가져오기 때문입니다. 그런 다음 모든 컨택트 제약이 충족되어 오브젝트가 충돌을 통과하지 않도록 모든 컨택트가 솔버로 피드됩니다.
다음 다이어그램은 t0 에서 이동하는 구체가 경로에 벽이 없다면 t1 포지션에 도달할 수 있는 경우를 나타냅니다. 추측성 알고리즘은 AABB를 타겟 포즈로 팽창시켜 각각 n1 및 n2 노멀을 포함하는 2개의 컨택트를 가져옵니다. 그런 다음 알고리즘은 구체가 벽면을 통과하지 않도록 솔버에 이러한 컨택트를 유지하도록 요청합니다.
현재 속도에 기반하여 팽창된 AABB는 이동 궤도의 가능한 모든 컨택트를 감지할 수 있도록 지원하여 솔버가 터널링을 방지할 수 있게 합니다.
추측성 CCD의 경우 컨택트가 솔빙 및 통합 단계가 아닌 충돌 감지 단계 동안에만 컨택트를 계산하므로 스위핑 기반 메서드보다 더 적은 리소스를 소모합니다. 또한 추측성 CCD는 오브젝트의 리니어 및 각도 모션에 기반하여 넓은 페이즈 AABB를 확대하므로 스위핑 기반 CCD에서 누락될 수 있는 컨택트까지 감지합니다.
그러나 추측성 CCD는 오브젝트의 모션이 부적절하게 추측성 컨택트 포인트의 영향을 받는 고스트 충돌을 초래할 수 있습니다. 이는 추측성 CCD가 근접점 알고리즘에 기반하여 모든 잠재 컨택트를 수집하여 컨택트 노멀의 정확도가 감소하기 때문입니다. 이러한 이유로 속도가 빠른 오브젝트가 테셀레이션된 충돌 부분을 따라 미끄러져 튀어오르는 문제가 발생할 수 있습니다. 예를 들어, 다음 다이어그램에서는 구체가 t0 부터 오른쪽으로 수평 이동하며, 통합 후 예상되는 포지션은 t1 입니다. 팽창된 AABB가 b0 및 b1 상자와 겹치고 CCD는 c0 과 c1 에 2개의 추측성 컨택트를 도출합니다. 추측성 CCD는 근접점 알고리즘을 사용하여 컨택트를 도출하므로 c0 은 솔버로 향하는 램프처럼 보이는 매우 경사진 노멀을 포함합니다.
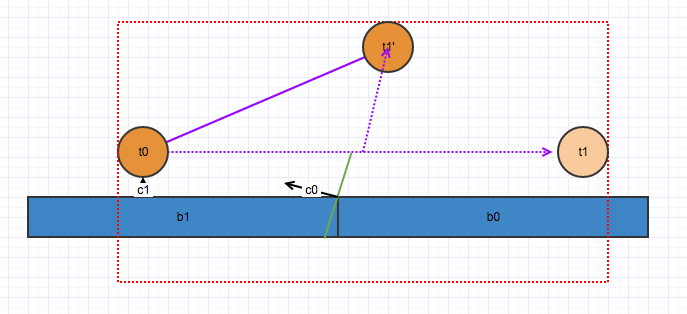
이처럼 매우 경사진 노멀로 인해 t1 은 통합 후 직선으로 이동하지 않고 위로 튀어오르게 됩니다.
또한 추측성 CCD는 추측성 컨택트가 충돌 검사 단계 동안만 계산되므로 터널링이 발생할 수 있습니다. 컨택트 솔빙 중 오브젝트가 솔버에서 과도한 에너지를 받으면 통합 후 팽창된 초기 AABB를 벗어날 수 있습니다. AABB 외부에서 충돌이 발생하면 오브젝트가 그냥 통과하게 됩니다.
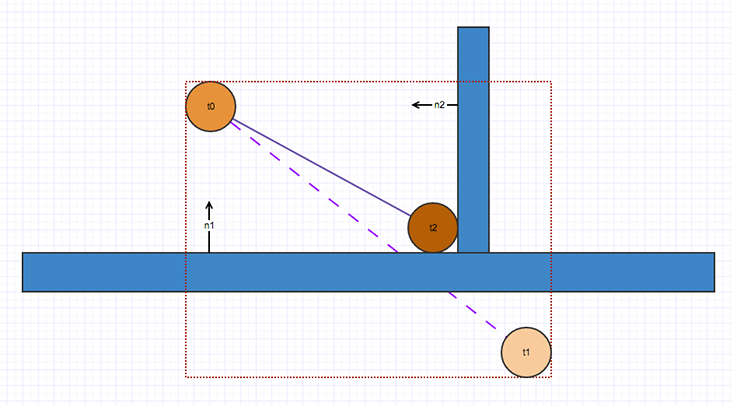
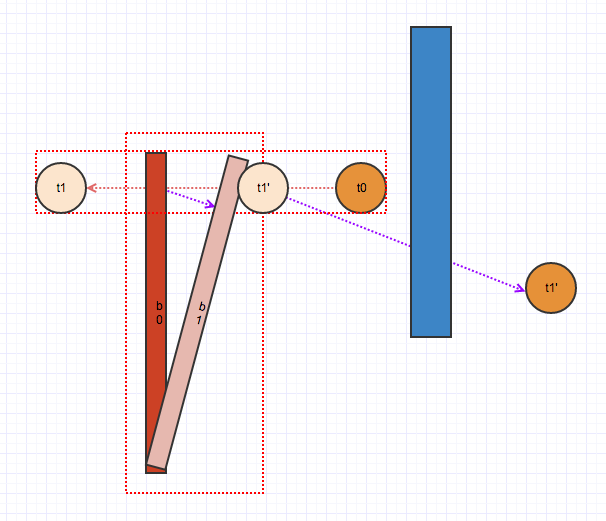
예를 들어, 다음 다이어그램은 막대가 시계 방향으로 회전하는 동안 구체가 t0 에서 왼쪽으로 움직이는 모습을 나타냅니다. 구체가 충돌에서 과도한 에너지를 받으면 t1 의 팽창된 AABB(빨간색 점선으로 표시된 사각형)를 이탈하게 됩니다. 아래의 파란색 상자에 나타난 것처럼 AABB 외부에서 충돌이 발생하면 구체가 AABB를 그냥 통과할 수 있습니다. 이는 솔버가 팽창된 AABB 내의 컨택트만 계산하며 솔빙 및 통합 단계 중 충돌 검사가 수행되지 않기 때문입니다.
2018–10–12 페이지 게시됨
[2018.3]에서 추측성 충돌 검사 추가됨(https://docs.unity3d.com/2018.3/Documentation/Manual/30_search.html?q=newin20183) NewIn20183
Did you find this page useful? Please give it a rating:
Thanks for rating this page!
What kind of problem would you like to report?
Thanks for letting us know! This page has been marked for review based on your feedback.
If you have time, you can provide more information to help us fix the problem faster.
Provide more information
You've told us this page needs code samples. If you'd like to help us further, you could provide a code sample, or tell us about what kind of code sample you'd like to see:
You've told us there are code samples on this page which don't work. If you know how to fix it, or have something better we could use instead, please let us know:
You've told us there is information missing from this page. Please tell us more about what's missing:
You've told us there is incorrect information on this page. If you know what we should change to make it correct, please tell us:
You've told us this page has unclear or confusing information. Please tell us more about what you found unclear or confusing, or let us know how we could make it clearer:
You've told us there is a spelling or grammar error on this page. Please tell us what's wrong:
You've told us this page has a problem. Please tell us more about what's wrong:
Thank you for helping to make the Unity documentation better!
Your feedback has been submitted as a ticket for our documentation team to review.
We are not able to reply to every ticket submitted.