물리 2D
2D 물리에 글로벌 설정을 적용하려면 Physics 2D 설정을 사용하십시오.
참고: 3D 물리의 글로벌 설정을 관리하려면 물리 3D 설정을 사용하십시오.
물리 2D 설정은 물리 시뮬레이션의 정확도 한계를 정의합니다. 일반적으로 더 정확한 시뮬레이션을 위해서는 프로세싱 오버헤드가 더 많이 필요하므로, 이 설정을 사용해 정확성과 성능을 중요성에 따라 조정할 수 있습니다. 자세한 내용은 매뉴얼의 물리 섹션을 참조하십시오.
| 프로퍼티 | 기능 | |||
|---|---|---|---|---|
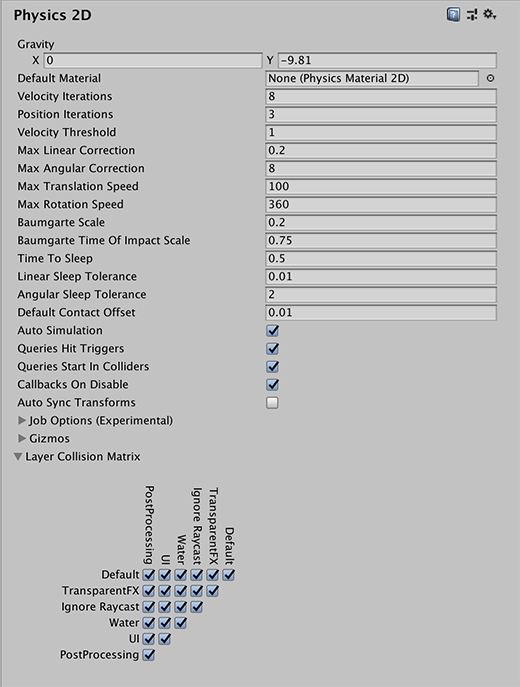
| Gravity | 모든 리지드바디 2D 게임 오브젝트에 적용되는 중력의 양을 설정합니다. 일반적으로 중력은 Y축의 음의 방향으로만 설정됩니다. | |||
| Default Material | 개별 콜라이더 2D에 레퍼런스가 할당되지 않은 경우, 물리 머티리얼 2D에 대한 레퍼런스를 설정합니다. | |||
| Velocity Iterations | 물리 엔진이 속도 효과를 결정하기 위해 수행하는 연산 반복 횟수를 설정합니다. 숫자가 클수록 물리가 정확해지지만 CPU 시간이 증가합니다. | |||
| Position Iterations | 물리 엔진이 포지션 변화를 결정하기 위해 수행하는 연산 반복 횟수를 설정합니다. 숫자가 클수록 물리가 정확해지지만 CPU 시간이 증가합니다. | |||
| Velocity Threshold | 탄성 충돌의 임계값을 설정합니다. 이 값보다 상대 속도가 낮은 충돌은 비탄성 충돌로 간주됩니다. 즉, 충돌하는 게임 오브젝트가 서로 튕겨나가지 않습니다. | |||
| Max Linear Correction | 제약 해결 시 사용되는 최대 리니어 포지션 보정 값을 설정합니다(범위: 0.0001–1000000). 오버슈트를 방지하는 데 유용합니다. | |||
| Max Angular Correction | 제약 해결 시 사용되는 최대 각도 보정 값을 설정합니다(범위: 0.0001–1000000). 오버슈트를 방지하는 데 유용합니다. | |||
| Max Translation Speed | 리지드바디 2D 게임 오브젝트의 물리 업데이트 도중의 최고 리니어 속도를 설정합니다. | |||
| Max Rotation Speed | 리지드바디 2D 게임 오브젝트의 물리 업데이트 도중의 최고 회전 속도를 설정합니다. | |||
| Baumgarte Scale | Unity가 충돌 중복을 해결하는 속도를 결정하는 스케일 요소를 설정합니다. | |||
| Baumgarte Time of Impact Scale | Unity가 충돌 시점 중복을 해결하는 속도를 결정하는 스케일 요소를 설정합니다. | |||
| Time to Sleep | 리지드바디 2D가 움직임을 멈춘 후 잠자기 모드로 전환될 수 있는 경과 시간(초)입니다. | |||
| Linear Sleep Tolerance | Time to Sleep__이 경과한 후 리지드바디 2D가 잠자기 모드로 전환되는 리니어 속도를 설정합니다. | |Angular Sleep Tolerance__ |
Time to Sleep__이 경과한 후 리지드바디 2D가 잠자기 모드로 전환되는 회전 속도를 설정합니다. |
|Default Contact Offset|실제로 접촉 상태가 아니더라도 in contact으로 간주되는 콜라이더의 근접도 거리값을 설정합니다. 상호 거리가 contactOffset 값의 합계보다 가까운 콜라이더는 접촉을 생성합니다. 그러면 오브젝트가 약간 떨어져 있더라도 충돌 검사 시스템이 미리 접촉 제약을 적용할 수 있습니다. 주의: 이 값을 너무 작게 설정하면 Unity가 연속적 폴리곤 충돌을 계산하지 못하게 될 수 있습니다. 반대로 값을 너무 크게 설정하면 버텍스 충돌 결함이 초래될 수 있습니다.| |Auto Simulation|물리 시뮬레이션을 자동으로 실행하거나 명시적 제어를 허용하려면 이 옵션을 활성화합니다.| |Queries Hit Triggers__ |
Triggers__로 표시된 콜라이더 2D가 (라인캐스트 또는 래이캐스트 같은) 물리 쿼리와 교차하는 경우 적중(hit)을 반환하게 하려면 이 옵션을 활성화합니다. 기본적으로 활성화되어 있습니다. | |Queries Start In Colliders__ | 콜라이더 2D 안에서 시작된 물리 쿼리가 시작된 콜라이더를 감지할 수 있게 하려면 이 옵션을 활성화합니다. |
| Callbacks On Disable | 접점이 있는 콜라이더가 비활성화된 경우 충돌 콜백을 생성하려면 이 옵션을 활성화합니다. | |||
| Auto Sync Transforms | 트랜스폼 변화를 물리 시스템과 자동으로 동기화하려면 이 옵션을 활성화합니다. | |||
| Job Options (Experimental) | 아래의 잡 옵션 섹션을 참조하십시오. | |||
| Gizmos | 아래의 기즈모 섹션을 참조하십시오. | |||
| Layer Collision Matrix | 레이어 기반 충돌 검사 시스템의 동작 방법을 정의합니다. 충돌 매트릭스에서 다른 레이어와 상호작용할 레이어에 체크를 표시하여 선택합니다. |
잡 옵션
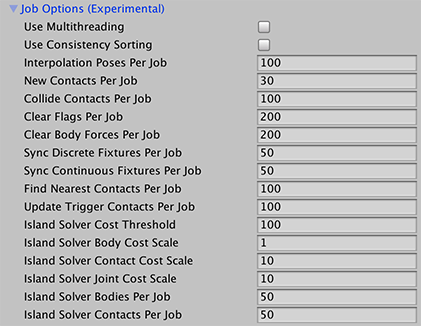
Job Options 섹션의 설정에서 C# 잡 시스템을 사용하여 멀티 스레드 물리를 설정할 수 있습니다.
| 프로퍼티: | 기능: |
|---|---|
| Use Multithreading | 잡 시스템을 사용하여 시뮬레이션 단계를 실행하려면 이 옵션을 활성화합니다. 실행 방법은 나머지 옵션을 사용하여 설정합니다. |
| Use Consistency Sorting | 일관된 처리 순서의 유지가 시뮬레이션에 중요한 경우 이 옵션을 활성화합니다. 여러 개의 CPU 스레드에서 시뮬레이션을 실시하면 별도의 데이터 배치가 생성됩니다. 이러한 별도의 배치를 처리하면 처리 순서의 결정론적 분명성이 감소하는 대신 결과가 더 빠르게 도출됩니다. |
| Interpolation Poses Per Job | 각 시뮬레이션 작업에서 보간되는 최소 리지드바디 2D 오브젝트 수를 설정합니다. |
| New Contacts Per Job | 각 시뮬레이션 작업에서 찾을 최소한의 새로운 접촉 수를 설정합니다. |
| Collide Contacts Per Job | 각 시뮬레이션 작업에서 충돌할 최소 접촉 수를 설정합니다. |
| Clear Flags Per Job | 각 시뮬레이션 작업에서 지울 최소 플래그 수를 설정합니다. |
| Clear Body Forces Per Job | 각 시뮬레이션 작업에서 지울 최소 바디 수를 설정합니다. |
| Sync Discrete Fixtures Per Job | 각 시뮬레이션 작업에서 이산적 아일랜드 솔빙 중 BroadPhase에서 동기화할 최소 고정물 수를 설정합니다. |
| Sync Continuous Fixtures Per Job | 각 시뮬레이션 작업에서 연속적 아일랜드 솔빙 중 BroadPhase에서 동기화할 최소 고정물 수를 설정합니다. |
| Find Nearest Contacts Per Job | 각 시뮬레이션 작업에서 찾을 최소한의 가장 가까운 접촉 수를 설정합니다. |
| Update Trigger Contacts Per Job | 각 시뮬레이션 작업에서 업데이트할 최소한의 트리거 접촉 수를 설정합니다. |
| Island Solver Cost Threshold | 이산적 아일랜드 솔빙 중 모든 바디, 접점과 조인트의 최소 임계값 비용을 설정합니다. |
| Island Solver Body Cost Scale | 이산적 아일랜드 솔빙 중 각 바디의 비용 스케일을 설정합니다. |
| Island Solver Contact Cost Scale | 이산적 아일랜드 솔빙 중 각 접점의 비용 스케일을 설정합니다. |
| Island Solver Joint Cost Scale | 이산적 아일랜드 솔빙 중 각 조인트의 비용 스케일을 설정합니다. |
| Island Solver Bodies Per Job | 아일랜드 솔빙을 수행할 때 각 시뮬레이션 작업에서 처리할 최소 바디 수를 설정합니다. |
| Island Solver Contacts Per Job | 아일랜드 솔빙을 수행할 때 각 시뮬레이션 작업에서 처리할 최소 접점 수를 설정합니다. |
기즈모
| 프로퍼티: | 기능: |
|---|---|
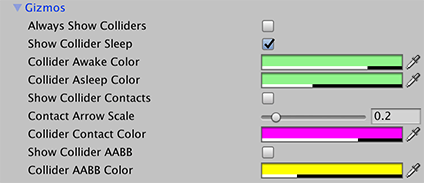
| Always Show Colliders | 선택하지 않은 콜라이더 기즈모도 표시하려면 이 옵션을 활성화합니다. |
| Show Collider Sleep | 각 콜라이더의 잠자기 상태를 표시하려면 이 옵션을 활성화합니다. |
| Collider Awake Color | 콜라이더(바디)가 깨어있음을 나타내는 컬러를 설정합니다. |
| Collider Asleep Color | 콜라이더(바디)가 잠자기 상태임을 나타내는 컬러를 설정합니다. |
| Show Collider Contacts | 각 기즈모의 현재 접촉을 표시하려면 이 옵션을 활성화합니다. |
| Contact Arrow Scale | 콜라이더 기즈모에 표시되는 접촉 화살표의 크기를 설정합니다. |
| Collider Contact Color | 콜라이더 접촉을 나타내는 기즈모 컬러를 설정합니다. |
| Show Collider AABB | 콜라이더의 경계 상자를 표시하려면 이 옵션을 활성화합니다. |
| Collider AABB Color | 콜라이더 경계 상자의 기즈모 컬러를 설정합니다. |
2018–10–02 페이지 수정됨
통합된 설정을 위해 업데이트됨