물리
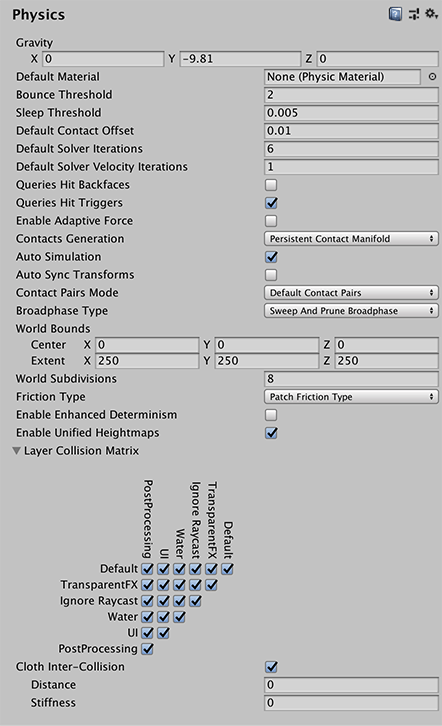
3D 물리에 글로벌 설정을 적용하려면 Physics 설정(메인 메뉴: Edit > Project Settings로 이동한 다음 Physics 카테고리 선택)을 사용하십시오.
참고: 2D 물리의 글로벌 설정을 관리하려면 물리 2D 설정을 사용하십시오.
이 설정은 물리 시뮬레이션의 정확도 한계를 정의합니다. 일반적으로 더 정확한 시뮬레이션을 위해서는 프로세싱 오버헤드가 더 많이 필요하므로, 이 설정을 사용해 정확성과 성능을 중요성에 따라 조정할 수 있습니다. 자세한 내용은 매뉴얼의 물리 섹션을 참조하십시오.
| 프로퍼티 | 기능 | |
|---|---|---|
| Gravity | x, y, z 축을 사용하여 모든 Rigidbody 컴포넌트에 가해지는 중력의 양을 설정할 수 있습니다. 중력을 사실적으로 설정하려면 y 축에 음수를 적용해야 합니다. 중력은 초 제곱당 세계 단위(meter)로 정의됩니다. 참고: 중력을 높일 경우, 접점(contacts)을 안정적으로 유지하려면 디폴트 솔버의 반복 횟수 값을 높여야 할 수도 있습니다. |
|
| Default Material | 개별 콜라이더에 레퍼런스가 할당되지 않은 경우 기본 물리 머티리얼에 대한 레퍼런스를 설정합니다. | |
| Bounce Threshold | 속도 값을 설정합니다. 충돌하는 오브젝트 2개의 상대 속도가 이 값보다 느리면 서로 튕기지 않습니다. 이 값에 따라 지터도 감소하므로, 너무 낮은 값으로 설정하지 않는 것이 좋습니다. | |
| Sleep Threshold | 전역 에너지 임계값을 설정합니다. 이 값 아래로 떨어지면 비키네마틱(물리 시스템에서 제어하지 않는) 리지드바디가 잠자기 모드로 전환될 수 있습니다. 리지드바디가 잠자기 모드일 때 이 값은 프레임마다 업데이트되지 않으므로 리소스가 덜 사용됩니다. 리지드바디의 운동 에너지를 질량으로 나눈 값이 임계값보다 작으면 잠자기 모드로 전환될 수 있습니다. | |
| Default Contact Offset | 충돌 검사 시스템이 충돌 접점을 생성하기 위해 사용하는 거리를 설정합니다. 이 값은 양수여야 하며, 0에 너무 가깝게 설정하면 지터링이 발생할 수 있습니다. 기본 설정은 0.01입니다. 콜라이더의 거리가 접점 오프셋 값의 합보다 작은 경우에만 충돌 접점이 생성됩니다. | |
| Default Solver Iterations | Unity가 물리 프레임마다 처리하는 솔버의 수를 지정합니다. 솔버는 조인트의 움직임이나 중복되는 리지드바디 컴포넌트 간의 컨택트를 관리하는 등 여러 물리 상호작용을 결정하는 작은 물리 엔진입니다. 이는 솔버 출력의 품질에 영향을 미칩니다. 기본이 아닌 Time.fixedDeltaTime이 사용되거나 설정의 사양이 매우 높은 경우 프로퍼티 변경이 권장됩니다. 보통 조인트나 컨택트에 의해 발생하는 지터를 감소시키는 데 사용됩니다. |
|
| Default Solver Velocity Iterations | 각 물리 프레임에서 솔버가 수행하는 속도 프로세스 수를 설정합니다. 솔버가 수행하는 프로세스가 많을수록 리지드바디 충돌 후에 나타나는 이탈 속도의 정확도가 높아집니다. 조인트가 있는 리지드바디 컴포넌트나 충돌 후에 너무 많이 움직이는 래그돌과 관련된 문제를 겪는 경우 이 값을 높여보아야 합니다. | |
| Queries Hit Backfaces |
Physics.Raycast 같은 물리 쿼리에서 메시콜라이더의 후면 삼각형과의 적중을 감지하도록 하려면 이 옵션을 활성화합니다. 이 설정은 기본적으로 비활성화되어 있습니다. |
|
| Queries Hit Triggers | 레이캐스트, SphereCast 및 SphereTest 등의 물리 적중 테스트에서 트리거로 표시된 콜라이더와 교차할 경우 적중이 반환되도록 하려면 이 옵션을 활성화합니다. 개별 레이캐스트는 이 동작을 오버라이드할 수 있습니다. 이 설정은 기본적으로 활성화되어 있습니다. | |
| Enable Adaptive Force | 적응적 힘을 사용하려면 이 옵션을 활성화합니다. 적응적 힘은 힘이 오브젝트 더미나 스택을 통해 힘이 전달되는 방식에 영향을 미쳐 더욱 사실적인 동작을 생성합니다. 이 설정은 기본적으로 비활성화되어 있습니다. | |
| Contacts Generation | 컨택트 생성 메서드를 선택합니다. | |
| Legacy Contacts Generation | Unity 5.5 이전 버전에서는 분할 축 정리(SAT에 기반한 컨택트 생성 메서드가 사용되었습니다. PCM은 보다 효율적이지만, Unity 5.5 이전 버전에서 생성된 프로젝트의 경우 물리를 다시 약간 변경하지 않으려면 SAT를 계속 사용하는 것이 더 수월할 수 있습니다. PCM을 사용하면 바운스가 다소 달라질 수 있고 컨택트 버퍼에 쓸모없는 컨택트가 생성될 수 있습니다(즉, OnCollisionEnter, OnCollisionStay, OnCollisionExit으로 전달된 충돌 인스턴스를 호출하는 배열).Upgrade advice: Unity 2018.2 이전 버전으로 만든 프로젝트를 마이그레이션하려면 매니폴드의 패치를 병합하고 컨택트를 선택하는 코드와 함께 작동하도록 스크립트를 업데이트해야 할 수 있습니다. |
|
| Persistent Contacts Manifold (PCM) | 물리 프레임마다 더 적은 컨택트를 생성하고 프레임 간에 더 많은 컨택트 데이터를 공유합니다. 또한 PCM 컨택트 생성 경로가 보다 정확해지고 일반적으로 대부분의 경우에 보다 나은 충돌 피드백을 산출합니다. 자세한 내용은 Nvidia의 지속적인 컨택트 매니폴드 문서를 참조하십시오(기본값). |
|
| Auto Simulation | 물리 시뮬레이션을 자동으로 실행하거나 명시적 제어를 허용하려면 이 옵션을 활성화합니다. | |
| Auto Sync Transforms | Transform 컴포넌트가 변경될 때마다 트랜스폼 변경 사항을 물리 시스템과 자동으로 동기화하려면 이 옵션을 활성화합니다. | |
| Contact Pairs Mode | 사용할 컨택트 페어 생성 유형을 선택합니다. | |
| Default Contact Pairs | 키네마틱-키네마틱 페어와 키네마틱-스태틱 페어를 제외하고 모든 컨택트 페어에서 충돌 및 트리거 이벤트를 수신합니다. | |
| Enable Kinematic Kinematic Pairs | 키네마틱-키네마틱 컨택트 페어에서 충돌 및 트리거 이벤트를 수신합니다. | |
| Enable Kinematic Static Pairs | 키네마틱-스태틱 컨택트 페어에서 충돌 및 트리거 이벤트를 수신합니다. | |
| Enable All Contact Pairs | 모든 컨택트 페어에서 충돌 및 트리거 이벤트를 수신합니다. | |
| Broadphase Type | 물리 시뮬레이션에 사용할 넓은 페이즈 알고리즘을 선택합니다. 자세한 내용은 PhysX SDK 및 리지드바디 충돌에 관한 NVIDIA 문서를 참조하십시오. | |
| Sweep and Prune Broadphase | 스위핑 및 프루닝(sweep-and-prune) 넓은 페이즈 충돌 메서드(멀리 떨어진 페어를 확인할 필요가 없도록 하나의 축을 따라 오브젝트 정렬하기)를 사용합니다. | |
| Multibox Pruning Broadphase | 멀티박스 프루닝은 그리드를 사용하며, 각 그리드 셀은 스위핑 및 프루닝(sweep-and-prune)을 수행합니다. 이렇게 하면 플랫 월드에 많은 게임 오브젝트가 있는 경우에 성능을 향상시킬 수 있습니다. | |
| World Bounds |
Multibox Pruning Broadphase 알고리즘을 사용할 때 멀리 떨어진 오브젝트가 서로 영향을 주지 않도록 월드를 둘러싸는 2D 그리드를 정의합니다. 이 옵션은 Broadphase Type 을 Multibox Pruning Broadphase 로 설정할 때만 사용됩니다. |
|
| World Subdivisions | 2D 그리드 알고리즘에서 X축과 Z축상에 있는 셀 수입니다. 이 옵션은 Broadphase Type 을 Multibox Pruning Broadphase 로 설정한 경우에만 사용됩니다. |
|
| Friction Type | 시뮬레이션에 사용할 마찰 알고리즘을 선택합니다. | |
| Patch Friction Type | 솔버의 반복 횟수가 적은 경우 가장 안정적인 결과를 산출하는 강한 기본적 마찰 알고리즘입니다. 이 메서드는 접촉한 오브젝트 페어당 최대 4개의 스칼라 솔버 제약만 사용합니다. | |
| One Directional Friction Type | 쿨롱(Coulomb) 마찰 모델을 간소화한 물리로, 접촉 포인트의 마찰이 컨택트 노멀의 번갈아 나타나는 탄젠트 방향에 적용됩니다. 통합에 필요한 반복 횟수가 감소하지만, 양방향 모델만큼 정확도가 높지는 않습니다. | |
| Two Directional Friction Type | 단방향 모델과 비슷하지만 두 탄젠트 방향에 마찰을 동시에 적용합니다. 이로 인해 솔버의 반복 횟수가 증가하지만, 정확도는 더 높습니다. 모든 접촉 포인트에 적용되므로 접촉 포인트가 여러 개인 경우 패치 마찰에 비해 리소스가 많이 소모됩니다. | |
| Enable Enhanced Determinism | 게임이 실행자를 결정론적 순서로 삽입하는 경우 실행자의 존재 유무와 상관없이 씬의 시뮬레이션이 일관적으로 이루어집니다. 이 모드에서는 이와 같은 추가적인 결정론적 분명성을 확보하기 위해 성능이 일부 저하됩니다. | |
| Enable Unified Heightmaps | 터레인 충돌을 메시 충돌과 같은 방식으로 처리하려면 이 옵션을 활성화합니다. | |
| Layer Collision Matrix | 레이어 기반 충돌 검사 시스템의 동작 방법을 정의합니다. 충돌 매트릭스에서 다른 레이어와 상호작용할 레이어에 체크를 표시하여 선택합니다. | |
| Cloth Inter-Collision | ||
| Distance | 각 상호 충돌하는 천 파티클 주변의 구체 지름을 정의합니다. Unity는 이러한 구체가 시뮬레이션을 진행하는 동안 중복되지 않게 합니다. 거리는 설정의 두 파티클 간 최소 거리보다 가까워야 합니다. 이 거리가 더 멀면 천 충돌이 일부 거리 제약을 위반하여 지터링이 발생할 수 있습니다. | |
| Stiffness | 상호 충돌하는 천 파티클의 분리 충격량 강도를 정의합니다. 천 솔버가 이를 계산하며, 파티클을 분리할 수 있을 정도여야 합니다. | |
2018–10–12 페이지 수정됨
5.5에 추가된 설정: Default Solver Iterations, Default Solver Velocity Iterations, Queries Hit Backfaces, Enable PCM
2017.4에서 Physics Manager 설정에 대한 설명이 업데이트됨
2018.3에 마찰 유형, 향상된 결정론적 분명성과 통합된 하이트맵 물리 설정 추가됨 NewIn20183
Did you find this page useful? Please give it a rating: