매뉴얼
Version:
2022.3
- Unity 사용자 매뉴얼 2022.3(LTS)
- Unity 2022 LTS의 새로운 기능
- 패키지와 기능 세트
- 릴리스된 패키지
- 2D 애니메이션
- 2D Aseprite Importer
- 2D 픽셀 퍼펙트
- 2D PSD 임포터
- 2D SpriteShape
- 2D 타일맵 엑스트라
- 어댑티브 퍼포먼스
- 어드레서블
- Ads Mediation
- Advertisement Legacy
- AI Navigation
- Alembic
- Analytics
- Android 로그캣
- 애니메이션 리깅
- Apple ARKit XR Plugin
- AR 파운데이션
- Authentication
- Build Automation
- 버스트
- CCD Management
- 시네머신
- Cloud Code
- Cloud Diagnostics
- Cloud Save
- 코드 커버리지
- 컬렉션
- Deployment
- Device Simulator Devices
- Economy
- 에디터 코루틴
- 엔티티
- Entities Graphics
- FBX 익스포터
- Google ARCore XR Plugin
- Unity용 Havok 피직스
- 입력 시스템
- iOS 14 광고 지원
- Jetbrains Rider 에디터
- 라이브 캡처
- Lobby
- 현지화
- Magic Leap XR 플러그인
- Matchmaker
- 수학
- 메모리 프로파일러
- ML 에이전트
- 모바일 알림
- Multiplay
- Multiplayer Tools
- Netcode for Entities
- Netcode for GameObjects
- Oculus XR 플러그인
- OpenXR 플러그인
- Polybrush
- 포스트 프로세싱
- ProBuilder
- 프로파일 분석기
- Python Scripting
- 레코더
- Relay
- 원격 설정
- 스크립터블 빌드 파이프라인
- 시퀀스
- Serialization
- Splines
- Sysroot Base
- Sysroot Linux x64
- System Metrics Mali
- 터레인 툴
- 테스트 프레임워크
- TextMeshPro
- 타임라인
- 툴체인 Linux x64
- 툴체인 MacOS Linux x64
- 툴체인 Win Linux x64
- 튜토리얼 저작 툴
- 튜토리얼 프레임워크
- Unity 퍼블리싱 포털
- Unity Logging
- Unity 피직스
- Unity Profiling Core API
- Unity 전송
- User Generated Content
- User Reporting
- 버전 관리
- 비주얼 스크립팅
- Visual Studio 코드 에디터
- Visual Studio 에디터
- WebGL 퍼블리셔
- XR Hands
- XR 인터랙션 툴킷
- XR 플러그인 관리
- 릴리스 후보(RC)
- 사전 릴리스 패키지
- 코어 패키지
- 빌트인 패키지
- 실험 단계 패키지
- 키워드별 패키지
- Unity의 패키지 관리자
- 커스텀 패키지 생성
- 기능 집합
- 릴리스된 패키지
- Unity에서 작업 수행
- Unity 설치
- Unity 업그레이드
- Unity 인터페이스
- 퀵스타트 가이드
- 고급 베스트 프랙티스 가이드
- 게임플레이 생성
- 에디터 기능
- 분석
- 에셋 워크플로
- 입력
- 2D 게임 개발
- 그래픽스
- 렌더 파이프라인
- 카메라
- 조명
- 모델(Models)
- 메시
- 텍스처
- 셰이더
- 셰이더의 핵심 개념
- 빌트인 셰이더
- 셰이더 그래프 사용
- 셰이더 작성
- 셰이더 작성 개요
- ShaderLab
- ShaderLab: 셰이더 오브젝트 정의
- ShaderLab: 서브셰이더 정의
- ShaderLab: 패스 정의하기
- ShaderLab: 셰이더 프로그램 추가
- ShaderLab: 패키지 요구 사항 지정하기
- ShaderLab: 커맨드
- ShaderLab: 카테고리 블록으로 커맨드 그룹화하기
- ShaderLab 커맨드: AlphaToMask
- ShaderLab 커맨드: Blend
- ShaderLab 커맨드: BlendOp
- ShaderLab 커맨드: ColorMask
- ShaderLab 커맨드: Conservative
- ShaderLab 커맨드: Cull
- ShaderLab 커맨드: Offset
- ShaderLab 커맨드: Stencil
- ShaderLab 커맨드: UsePass
- ShaderLab 커맨드: GrabPass
- ShaderLab 커맨드: ZClip
- ShaderLab 커맨드: ZTest
- ShaderLab 커맨드: ZWrite
- ShaderLab 레거시 기능
- Unity의 HLSL
- Unity의 GLSL
- 예제 셰이더
- 표면 셰이더 작성
- 여러 그래픽스 API를 위한 셰이더 작성
- 셰이더 성능 이해
- 머티리얼
- 시각 효과
- 하늘
- 컬러
- 그래픽스 API 지원
- 그래픽스 퍼포먼스 및 프로파일링
- 월드 빌드
- 물리
- 스크립팅
- 멀티플레이어 및 네트워킹
- 오디오(Audio)
- 동영상 개요
- 애니메이션
- 사용자 인터페이스(UI) 생성
- Unity의 UI 시스템 비교
- UI 툴킷
- UI 툴킷 시작하기
- UI 빌더
- UI 구조화
- 시각적 트리
- UXML을 통한 UI 구조
- C# 스크립트로 UI 구조화
- 커스텀 컨트롤
- 요소 관리를 위한 베스트 프랙티스
- 로직으로 UXML 문서 캡슐화
- UXML 요소 레퍼런스
- UXML 요소 BindableElement
- UXML 요소 VisualElement
- UXML 요소 BoundsField
- UXML 요소 BoundsIntField
- UXML 요소 Box
- UXML 요소 Button
- UXML 요소 ColorField
- UXML 요소 CurveField
- UXML 요소 DoubleField
- UXML 요소 DropdownField
- UXML 요소 EnumField
- UXML 요소 EnumFlagsField
- UXML 요소 FloatField
- UXML 요소 Foldout
- UXML 요소 GradientField
- UXML 요소 GroupBox
- UXML 요소 Hash128Field
- UXML 요소 HelpBox
- UXML 요소 IMGUIContainer
- UXML 요소 Image
- UXML 요소 InspectorElement
- UXML 요소 IntegerField
- UXML 요소 Label
- UXML 요소 LayerField
- UXML 요소 LayerMaskField
- UXML 요소 LongField
- UXML 요소 ListView
- UXML 요소 MaskField
- UXML 요소 MinMaxSlider
- UXML 요소 MultiColumnListView
- UXML 요소 MultiColumnTreeView
- UXML 요소 ObjectField
- UXML 요소 PopupWindow
- UXML 요소 ProgressBar
- UXML 요소 PropertyField
- UXML 요소 RadioButton
- UXML 요소 RadioButtonGroup
- UXML 요소 RectField
- UXML 요소 RectIntField
- UXML 요소 RepeatButton
- UXML 요소 ScrollView
- UXML 요소 Scroller
- UXML 요소 Slider
- UXML 요소 SliderInt
- UXML 요소 TagField
- UXML 요소 TextElement
- UXML 요소 TextField
- UXML 요소 Toggle
- UXML 요소 Toolbar
- UXML 요소 ToolbarBreadcrumbs
- UXML 요소 ToolbarButton
- UXML 요소 ToolbarMenu
- UXML 요소 ToolbarPopupSearchField
- UXML 요소 ToolbarSearchField
- UXML 요소 ToolbarSpacer
- UXML 요소 ToolbarToggle
- UXML 요소 TreeView
- UXML 요소 TwoPaneSplitView
- UXML 요소 UnsignedIntegerField
- UXML 요소 UnsignedLongField
- UXML 요소 Vector2Field
- UXML 요소 Vector2IntField
- UXML 요소 Vector3Field
- UXML 요소 Vector3IntField
- UXML 요소 Vector4Field
- UI 구조화 예시
- UI 스타일링
- UI 툴킷 디버거
- 이벤트로 동작 컨트롤
- UI 렌더러
- 에디터 UI 지원
- 런타임 UI 지원
- 텍스트로 작업
- 예시
- 마이그레이션 가이드
- Unity UI
- 즉시 모드 GUI(IMGUI)
- Unity 서비스
- Unity 서비스를 위한 프로젝트 설정
- Unity 조직
- Unity 애즈
- 레거시 애널리틱스
- Unity 클라우드 콘텐츠 제공
- Unity IAP
- Unity IAP 설정
- 크로스 플랫폼 가이드
- 스토어 가이드
- 스토어 구현
- Unity 클라우드 다이어그노스틱
- Unity 통합
- 멀티플레이어 서비스
- Unity 퍼블리싱 포털
- Unity 액셀러레이터
- XR
- Unity의 에셋 스토어
- 플랫폼 개발
- 다른 애플리케이션에서 Unity as a Library 사용
- 딥 링크
- Xcode 프레임 디버거 Unity 통합
- Android
- 전용 서버
- iOS
- Linux
- macOS
- tvOS
- WebGL
- Windows
- 유니버설 Windows 플랫폼
- Unity 검색
- 레거시 네비게이션과 경로 탐색
- 내비게이션 개요
- 내비게이션 레퍼런스
- 내비게이션 작업 수행 방법
- 용어집
- Unity 사용자 매뉴얼 2022.3(LTS)
- Unity에서 작업 수행
- 게임플레이 생성
- Unity의 회전 및 방향
Unity의 회전 및 방향
Unity는 왼쪽 좌표 시스템을 사용합니다.Unity에서는 오일러 각과 쿼터니언을 모두 사용하여 회전과 방향을 나타낼 수 있습니다.이러한 표현은 동일하지만 용도와 한계가 다릅니다.
보통 씬에서는 방향을 오일러 각으로 표시하는 트랜스폼 컴포넌트를 사용하여 오브젝트를 회전합니다. 그러나 Unity는 회전과 방향을 내부적으로 쿼터니언으로 저장하므로 짐벌 락으로 이어질 수도 있는 더 복잡한 모션에 유용할 수 있습니다.
왼쪽 좌표 시스템
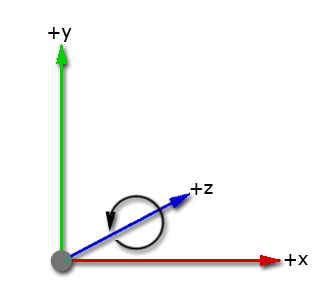
좌표 시스템은 3차원 공간에서 오브젝트의 포지션을 설명합니다.Unity는 왼쪽 좌표 시스템을 사용합니다. 양수인 X축은 오른쪽을 가리키고, 양수인 Y축은 위쪽을 가리키며, 양수인 Z축은 앞쪽을 가리킵니다.Unity 왼쪽 좌표 시스템으로, 양수 x축에서 양수 y축으로 회전하는 방향은 양수 z축을 따라 볼 때 시계 반대 방향입니다.
오일러 각
트랜스폼 좌표에서 Unity는 벡터 프로퍼티 Transform.eulerAngles X, Y, Z를 사용하여 회전을 표시합니다. 노멀 벡터와는 달리 이 값은 X, Y, Z 축에 대한 실제 회전 각도(단위: 도)를 나타냅니다.
오일러 각 회전은 3개의 축을 중심으로 3개의 개별 회전을 수행합니다. Unity는 Z축, X축, Y축을 중심으로 오일러 회전을 순차적으로 수행합니다. 이 회전 방법은 외부 회전입니다. 회전하는 동안 원래 좌표계가 변경되지 않습니다.
게임 오브젝트를 회전하려면 각 축이 트랜스폼 컴포넌트로 회전할 각의 크기를 입력할 수 있습니다. 스크립트로 게임 오브젝트를 회전하려면 Transform.eulerAngles를 사용합니다. 오일러 각으로 변환하여 계산하고 회전하려면 짐벌 락 문제가 발생할 위험이 있습니다.
짐벌 락
3D 공간에 있는 오브젝트가 자유도를 잃고 2차원 내에서만 회전할 수 있는 경우를 짐벌 락이라고 합니다. 두 축이 평행하면 오일러 각으로 짐벌 락이 발생할 수 있습니다. 스크립트에서 회전 값을 오일러 각으로 변환하지 않으면 쿼터니언을 사용하여 짐벌 락을 방지해야 합니다.
짐벌 락 문제가 있는 경우 Transform.RotateAround를 사용하면 오일러 각을 피할 수 있습니다. 각 축에 Quaternion.AngleAxis를 사용하여 함께 곱할 수도 있습니다(쿼터니언 곱셈은 각 회전에 차례로 적용됩니다).
쿼터니언
쿼터니언은 3D 공간에서 공간 방향과 회전의 고유한 표현을 위한 수학적 표기법을 제공합니다. 쿼터니언은 4개의 숫자를 사용하여 3D에서 단위 축을 중심으로 회전 방향과 각도를 인코딩합니다. 이 4개의 값은 각이나 각의 크기가 아닌 복소수입니다. 자세한 내용은 쿼터니언의 수학을 참조하십시오.
쿼터니언 회전은 계산이 효율적이고 안정적이기 때문에 Unity는 회전 값을 쿼터니언으로 전환하여 저장합니다.단일 쿼터니언은 어떤 축에 대해서도 360도보다 큰 회전을 나타낼 수 없기 때문에 Unity 에디터는 회전을 쿼터니언으로 표시하지 않습니다.
Quaternion 클래스를 사용하면 쿼터니언을 직접 사용할 수 있습니다.회전에 스크립트를 사용하는 경우 쿼터니언 클래스와 함수를 사용하여 회전 값을 생성하고 변경할 수 있습니다.회전 값은 오일러 각으로 적용할 수 있지만 문제를 방지하려면 쿼터니언으로 저장해야 합니다.
오일러 각과 쿼터니언 간의 전환
다음 스크립트를 사용하여 쿼터니언과 오일러 각 간을 변환하고 원하는 방식으로 회전을 보고 편집할 수 있습니다.
-
Quaternion.Euler함수를 사용하여 오일러 각도에서 쿼터니언으로 변환할 수 있습니다. -
Quaternion.eulerAngles함수를 사용하여 쿼터니언을 오일러 각으로 변환할 수 있습니다.
추가 리소스
Did you find this page useful? Please give it a rating:
Thanks for rating this page!
What kind of problem would you like to report?
Thanks for letting us know! This page has been marked for review based on your feedback.
If you have time, you can provide more information to help us fix the problem faster.
Provide more information
You've told us this page needs code samples. If you'd like to help us further, you could provide a code sample, or tell us about what kind of code sample you'd like to see:
You've told us there are code samples on this page which don't work. If you know how to fix it, or have something better we could use instead, please let us know:
You've told us there is information missing from this page. Please tell us more about what's missing:
You've told us there is incorrect information on this page. If you know what we should change to make it correct, please tell us:
You've told us this page has unclear or confusing information. Please tell us more about what you found unclear or confusing, or let us know how we could make it clearer:
You've told us there is a spelling or grammar error on this page. Please tell us what's wrong:
You've told us this page has a problem. Please tell us more about what's wrong:
Thank you for helping to make the Unity documentation better!
Your feedback has been submitted as a ticket for our documentation team to review.
We are not able to reply to every ticket submitted.