マニュアル
Version:
2020.3
- Unity ユーザーマニュアル 2020.3 (LTS)
- Unity 2020 LTS の新機能
- パッケージ
- 検証済みパッケージ
- 2D Animation
- 2D Pixel Perfect
- 2D PSD Importer
- 2D SpriteShape
- Adaptive Performance
- Adaptive Performance Samsung Android
- Addressables
- Advertisement
- Alembic
- Analytics Library
- Android Logcat
- Animation Rigging
- AR Foundation
- ARCore XR Plugin
- ARKit Face Tracking
- ARKit XR Plugin
- Burst
- Cinemachine
- Code Coverage
- Core RP Library
- Editor Coroutines
- FBX Exporter
- High Definition RP
- In App Purchasing
- Input System
- iOS 14 Advertising Support
- JetBrains Rider Editor
- Magic Leap XR Plugin
- ML Agents
- Mobile Notifications
- Multiplayer HLAPI
- Oculus XR Plugin
- OpenXR Plugin
- Polybrush
- Post Processing
- ProBuilder
- Profile Analyzer
- Quick Search
- Recorder
- Remote Config
- Scriptable Build Pipeline
- Shader Graph
- Test Framework
- TextMeshPro
- Timeline
- Unity Distribution Portal (UDP)
- Universal RP
- Version Control
- Visual Effect Graph
- Visual Studio Code Editor
- Visual Studio Editor
- WebGL Publisher
- Windows XR Plugin
- Xiaomi SDK
- XR Plugin Management
- プレビューパッケージ
- コアパッケージ
- ビルトインパッケージ
- AI
- Android JNI
- Animation
- Asset Bundle
- Audio
- Cloth
- Director
- Image Conversion
- IMGUI
- JSONSerialize
- Particle System
- Physics
- Physics 2D
- Screen Capture
- Terrain
- Terrain Physics
- Tilemap
- UI
- UIElements
- Umbra
- Unity Analytics
- Unity Web Request
- Unity Web Request Asset Bundle
- Unity Web Request Audio
- Unity Web Request Texture
- Unity Web Request WWW
- Vehicles
- Video
- VR
- Wind
- XR
- パッケージをキーワードで探す
- パッケージをキーワードで探す
- Unity の Package Manager
- カスタムパッケージの作成
- 検証済みパッケージ
- Unity を使用する
- Unity のインストール
- Unity のアップグレード
- API アップデーターの使用
- Unity 2020 LTS へのアップグレード
- Unity 2019 LTS へのアップグレード
- Unity 2018 LTS へのアップグレード
- Legacy Upgrade Guides
- Unity のインターフェース
- ゲームの作成
- エディター機能
- 分析
- アセットワークフロー
- 入力
- 2D
- 2D ゲーム
- 2D ソート
- スプライト
- Tilemap
- 2D 物理演算リファレンス
- グラフィックス
- レンダーパイプライン
- カメラ
- ポストプロセス
- ライティング
- モデル
- メッシュ
- テクスチャ
- シェーダー
- シェーダーの基礎概念
- ビルトインシェーダー
- Shader Graph の使用
- シェーダーの作成
- シェーダー作成の概要
- ShaderLab
- ShaderLab: シェーダーオブジェクトの定義
- ShaderLab: SubShader の定義
- ShaderLab: パスの定義
- ShaderLab: シェーダープログラムの追加
- ShaderLab: コマンド
- ShaderLab: Category ブロックによるコマンドのグループ化
- ShaderLab コマンド: AlphaToMask
- ShaderLab コマンド: Blend
- ShaderLab コマンド: BlendOp
- ShaderLab コマンド: ColorMask
- ShaderLab コマンド: Conservative
- ShaderLab コマンド: Cull
- ShaderLab コマンド: Offset
- ShaderLab コマンド: Stencil
- ShaderLab コマンド: UsePass
- ShaderLab コマンド: GrabPass
- ShaderLab コマンド: ZClip
- ShaderLab コマンド: ZTest
- ShaderLabコマンド: ZWrite
- ShaderLab の古い機能
- Unity での HLSL
- Unity での GLSL
- シェーダーの例
- サーフェスシェーダーの記述
- 様々なグラフィックス API のシェーダーの作成
- シェーダーのパフォーマンスとプロファイリング
- マテリアル
- パーティクルシステム
- パーティクルシステムソリューションの選択
- ビルトインのパーティクルシステム
- ビルトインパーティクルシステムの使用
- パーティクルシステム - 頂点ストリームとスタンダードシェーダーサポート
- パーティクルシステム GPU インスタンス
- パーティクルシステム C# Job System インテグレーション
- コンポーネントとモジュール
- パーティクルシステム
- パーティクルシステムモジュール
- Particle System メインモジュール
- Emission モジュール
- Shape モジュール
- Velocity Over Lifetime モジュール
- Noise モジュール
- Limit Velocity Over Lifetime モジュール
- Inherit Velocity モジュール
- Lifetime by Emitter Speed
- Force Over Lifetime モジュール
- Color Over Lifetime モジュール
- Color By Speed モジュール
- Size Over Lifetime モジュール
- Size by Speed モジュール
- Rotation Over Lifetime モジュール
- Rotation By Speed モジュール
- External Forces モジュール
- Collision モジュール
- Triggers モジュール
- Sub Emitters モジュール
- Texture Sheet Animation モジュール
- Lights モジュール
- Trails モジュール
- Custom Data モジュール
- Renderer モジュール
- Particle System Force Field
- ビルトインのパーティクルシステムの例
- Visual Effect Graph
- 環境の作成
- 空
- ビジュアルエフェクトのコンポーネント
- 色
- グラフィックス API サポート
- グラフィックスパフォーマンスの最適化
- 物理演算
- スクリプト
- マルチプレイヤーとネットワーク
- マルチプレイヤーゲーム作成の概要
- マルチプレイヤープロジェクトの設定
- NetworkManager の使用
- Network Manager HUD の使用
- Network Manager HUD の LAN モード
- マッチメーカーモードの Network Manager HUD
- シングルプレイヤーゲームを Unity Multiplayer に変換
- デバッグ情報
- マルチプレイヤー高レベル API
- Multiplayer コンポーネントリファレンス
- Multiplayer クラスリファレンス
- Multiplayer 暗号化プラグイン
- UnityWebRequest
- オーディオ
- オーディオの概要
- オーディオファイル
- トラッカーモジュール
- Audio Mixer
- ネイティブオーディオプラグイン SDK
- Audio プロファイラー
- アンビソニックオーディオ
- オーディオリファレンス
- オーディオクリップ
- Audio Listener
- オーディオソース
- Audio Mixer
- Audio Filter
- Audio Effect
- Audio Low Pass Effect
- Audio High Pass Effect
- Audio Echo Effect
- Audio Flange Effect
- Audio Distortion Effect
- Audio Normalize Effect
- Audio Parametric Equalizer Effect
- Audio Pitch Shifter Effect
- Audio Chorus Effect
- Audio Compressor Effect
- Audio SFX Reverb Effect
- Audio Low Pass Simple Effect
- Audio High Pass Simple Effect
- Reverb Zones
- Microphone(マイク)
- Audio Settings
- ビデオの概要
- アニメーション
- ユーザーインターフェース (UI) の作成
- Unity の UI システムの比較
- UI Toolkit
- Unity UI
- IMGUI (即時モードの GUI)
- ナビゲーションと経路探索
- Unity サービス
- Unity Services のためのプロジェクトの設定
- Unity Organizations
- Unity Ads
- Unity Analytics
- Unity Cloud Build
- Unity Cloud Content Delivery
- Unity IAP
- Unity IAP の設定
- クロスプラットフォームガイド
- ストア ガイド
- ストアの実装
- Unity Collaborate
- Unity Collaborate の設定
- Unity プロジェクトにチームメンバーを加える
- Unity Collaborate の履歴
- Collaborate で Cloud Build を有効にする
- Unity エディターのバージョンの管理
- ファイルを元に戻す
- ファイル競合の解決
- Collaborate への公開時に特定のアセットを除外する
- Collaborate に個別にファイルを公開する
- プロジェクトを以前のバージョンに復元する
- 「編集中」の表示
- クラウドストレージの管理
- プロジェクトを別のバージョン管理システムに移行する
- Unity Accelerator
- Collaborate のトラブルシューティングのヒント
- Unity Cloud Diagnostics
- Unity Integration
- Multiplayer
- Unity Distribution Portal (UDP)
- XR
- オープンソースリポジトリ
- Unity の Asset Store
- プラットフォーム特有の情報
- Unity as a Library を他のアプリケーションで使用
- ディープリンクを有効にする
- スタンドアロン
- macOS
- Linux
- tvOS
- WebGL
- iOS
- Android
- Windows
- Unity を Windows と UWP アプリケーションへ統合
- Windows 全般
- ユニバーサル Windows プラットフォーム
- Getting Started
- Universal Windows Platform: Deployment
- Universal Windows Platform (UWP) build settings
- Windows Device Portal Deployment
- Universal Windows Platform: Profiler
- Universal Windows Platform: Command line arguments
- Universal Windows Platform: Association launching
- AppCallbacks class
- Universal Windows Platform: WinRT API in C# scripts
- ユニバーサル Windows プラットフォームの Player 設定
- Universal Windows Platform: IL2CPP scripting back end
- FAQ
- Universal Windows Platform: Examples
- Universal Windows Platform: Code snippets
- Known issues
- 古いトピック
- 用語集
物理的連結
物理的連結とは、一群の 連結ボディ を論理的なツリー状に整理したもので、各親子関係には相互に制約された相対的な動きが反映されます。
物理的連結の主な目的は、ゲーム以外の産業用アプリケーションでジョイントを使用する場合に、リアルな物理動作を提供することです。物理的連結を使うと、通常のジョイント よりもずっと簡単に、ロボットアームやキネマティックチェーンなどをシミュレートできます。
連結の設定と通常のジョイントの比較
2 つの物理的なボディを 1 つのジョイントでリンクさせるという最も基本的なシナリオでは、以下の表に示すように、連結を構築するか、通常のジョイントを使用します。
| 連結の設定 | 通常のジョイントの設定 | |
|---|---|---|
| 階層 | • ゲームオブジェクト + 連結ボディ • ゲームオブジェクト + 連結ボディ |
• ゲームオブジェクト + 連結ボディ • ゲームオブジェクト + 連結ボディ + ジョイント |
| 関係 | ゲームオブジェクトには階層関係 (親子) があります。 ノート: 物理エンジンでは、Unity のトランスフォーム階層を使って親子関係を表現します。 |
ゲームオブジェクトには階層関係が常にあるわけではありません。 ノート: より高度なシナリオでは、キネマティックループを自由にシミュレートできます。 |
| 物理的ボディ | どちらのゲームオブジェクトも、物理的なボディのプロパティやその他を定義する Articulation Body コンポーネントを持っています。 | どちらのゲームオブジェクトも、物理的なボディのプロパティやその他を定義する RigidBody コンポーネントを持っています。 |
| ジョイント | 子ゲームオブジェクトの連結ボディにはジョイントのプロパティがあり、ジョイントタイプを選択できます。 | また、ゲームオブジェクトの 1 つには Joint コンポーネントがあります。ジョイントのプロパティは、加えた Joint コンポーネントのタイプによって異なります。 |
ただし、結果として生じる全体的な動作は、両方の場合で同じではありません (特に、この原理を複数の物理的なボディやジョイントに拡張した場合)。
ラグドール、ロボットアーム、複数の共有ヒンジを持つメカニズムなどのキネマティックチェーンを通常のジョイントで作ろうとすると、物理エンジンが解決できないシナリオに遭遇し、特定の制約が満たされない場合があります。その結果、動きがぎこちなくなったり、非現実的な動きになったりすることがあります。このようなジョイントは見た目が奇妙になるだけでなく、実際のデバイスのシミュレーションに使用することができず、工業デザインのモデル化やプロトタイプ化に支障をきたすことになります。
Unity での連結の構築
Unityで物理連結を構築するには、連結が構成される各ゲームオブジェクトに Articulation Body コンポーネントを加える必要があります。各 Articulation Body コンポーネントでは、1 つの場所でまとめて設定を行うことができます。
対応するゲームオブジェクトの物理的なボディのプロパティ。基本的には、その質量と物理環境への反応の仕方。
ゲームオブジェクトとその親ゲームオブジェクトを紐づけるジョイントのタイプとプロパティ (連結のルートを除く)。
以下の例では、3 つの物理体と 2 つのジョイントを含む単純な物理連結を示しています。
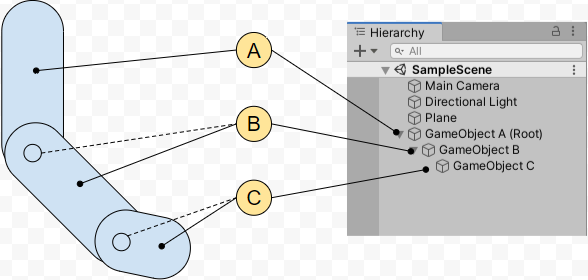
このような連結を Unity で構築するには以下を行います。
3 つのゲームオブジェクトのリニアな階層を作ります。
この 3 つのゲームオブジェクトそれぞれに、Articulation Body コンポーネントを加えます。
連結ボディの各コンポーネントを設定します (上の図を参照)。
| ゲームオブジェクト | Articulation Body コンポーネントの設定 |
|---|---|
| A (ルート) | ゲームオブジェクト A に対してのみ、物理的ボディのプロパティを定義することができます。 |
| B | 以下を定義できます。 • ゲームオブジェクト B の物理的ボディのプロパティ • ゲームオブジェクト A とのジョイントのタイプとプロパティ |
| C | 以下を定義できます。 • ゲームオブジェクト C の物理的ボディのプロパティ • ゲームオブジェクト B とのジョイントのタイプとプロパティ |
**ノート: ** 定義によって、連結は 1 つのルートしか持つことができず、キネマティックループを持つことはできません。キネマティックループが必要な場合は、通常のジョイント を使用してください。
制限: 非常に長い連結チェーンを構築したい場合は、Unity がサポートする最大階層深度は 64 ゲームオブジェクトであることを認識する必要があります。
連結ジョイントのタイプと自由度
1 つの連結ボディで選択設定できるのは、以下の 4 種類の連結ジョイントです。
Fixed ジョイント: ボディの間に硬くて壊れない、伸縮しないリンクを設定します。
Prismatic ジョイント: 特定の軸に沿ってスライドする以外のすべての動きをを防止します。
Revolute ジョイント: 特定の軸を中心に回転させることができます (ヒンジのようなもの)。
Spherical ジョイント: 解剖学的な関節で、2 回のスイングと 1 回のツイストが可能です。
連結のすべてのロックされた自由度は、デザイン上、壊れることも伸びることもありません。これを実現するために、物理エンジンは縮小した座標空間を使用しています。この空間では、ボディはロックされていない可動軸に関する座標のみを持ちます。
一方、通常の反復ジョイントでは、物理エンジンは最大座標空間を強制し、ソルバーが一連の反復後に収束できる場合にのみ制約を満たすことを保証します。
物理的連結デモ
Unity の ロボットデモプロジェクト にある連結ジョイントのシリアルリンクロボットアームを試してみてください。
Did you find this page useful? Please give it a rating:
Thanks for rating this page!
What kind of problem would you like to report?
Thanks for letting us know! This page has been marked for review based on your feedback.
If you have time, you can provide more information to help us fix the problem faster.
Provide more information
You've told us this page needs code samples. If you'd like to help us further, you could provide a code sample, or tell us about what kind of code sample you'd like to see:
You've told us there are code samples on this page which don't work. If you know how to fix it, or have something better we could use instead, please let us know:
You've told us there is information missing from this page. Please tell us more about what's missing:
You've told us there is incorrect information on this page. If you know what we should change to make it correct, please tell us:
You've told us this page has unclear or confusing information. Please tell us more about what you found unclear or confusing, or let us know how we could make it clearer:
You've told us there is a spelling or grammar error on this page. Please tell us what's wrong:
You've told us this page has a problem. Please tell us more about what's wrong:
Thank you for helping to make the Unity documentation better!
Your feedback has been submitted as a ticket for our documentation team to review.
We are not able to reply to every ticket submitted.
Copyright © 2021 Unity Technologies. Publication 2020.3