Physics 2D reference
The following Project settings manage the global settings for Physics 2D, which define the limits on the accuracy of the physics simulation of 2D GameObjects in the Unity physics system. A more accurate simulation requires more processing overhead, and these settings allow you to adjust the trade-off between accuracy and performance that best suits your project.
To open the Physics 2D project settings window, go to Edit > Project Settings… > Physics 2D to manage the global Project settings for Physics 2D
Note: To manage the global settings for 3D physics instead, refer to the Physics Project settings reference page.
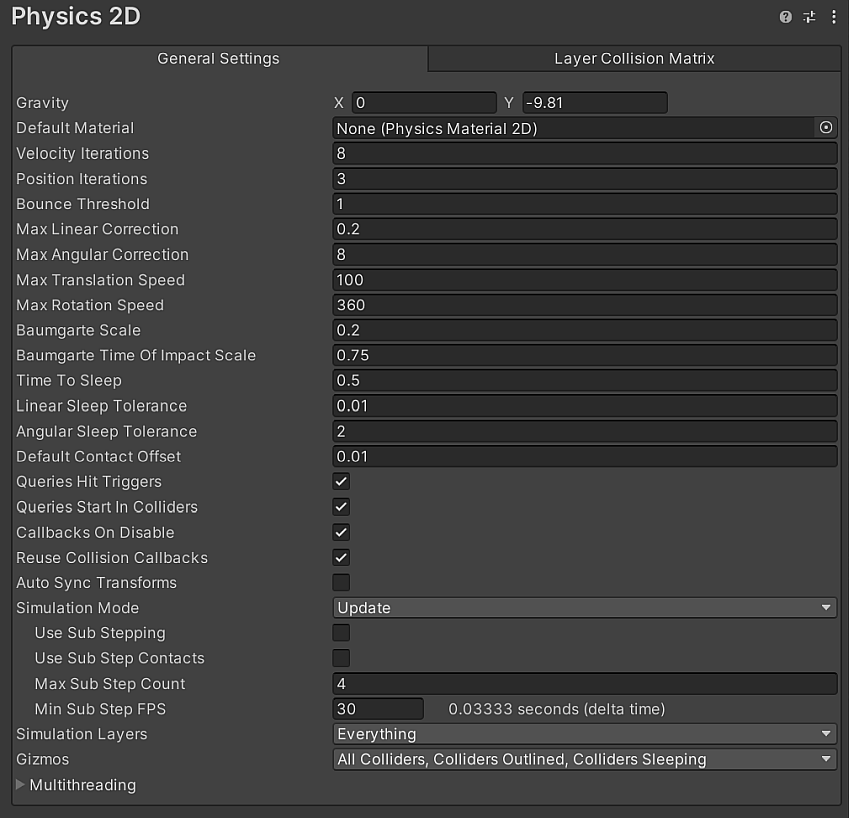
General Settings tab
The following are the properties available in the General Settings tab of the Physics 2D manager window.
| 属性 | 功能 | |
|---|---|---|
| Gravity | Set the amount of gravity applied to all Rigidbody 2D GameObjects. Usually you only set gravity for the negative direction of the y-axis. | |
| Default Material | 设置在没有为单独 2D 碰撞体分配材质的情况下需要使用的 2D 物理材质。 | |
| Velocity Iterations | Set the number of iterations made by the physics system to resolve velocity effects. Higher numbers result in more accurate physics calculations but the Editor requires more CPU time. | |
| Position Iterations | Set the number of iterations made by the physics system to resolve position changes. Higher numbers result in more accurate physics calculations but also requires more CPU time. | |
| Bounce Threshold | Set the threshold for elastic collisions. Unity treats any collisions with a relative linear velocity below this threshold as inelastic, so no bounce will occur. | |
| Max Linear Correction | 设置解算约束时使用的最大线性位置校正(范围从 0.0001 到 1000000)。这有助于防止过冲。 | |
| Max Angular Correction | 设置解算约束时使用的最大角度校正(范围从 0.0001 到 1000000)。这有助于防止过冲。 | |
| Max Translation Speed | 设置任何物理更新期间 2D 刚体游戏对象的最大线性速度。 | |
| Max Rotation Speed | 设置任何物理更新期间 2D 刚体游戏对象的最大旋转速度。 | |
| Baumgarte Scale | 设置用于确定 Unity 解算碰撞重叠速度的缩放因子。 | |
| Baumgarte Time of Impact Scale | 设置用于确定 Unity 解算撞击时间重叠速度的缩放因子。 | |
| Time to Sleep | Set the time (in seconds) that must pass after a Rigidbody 2D stops moving before it goes to sleep. | |
| Linear Sleep Tolerance | Set the linear speed below which a Rigidbody 2D goes to sleep after the Time to Sleep elapses. | |
| Angular Sleep Tolerance | Set the rotational speed below which a Rigidbody 2D goes to sleep after Time to Sleep elapses. | |
| Default Contact Offset | Set a proximity distance value for Colliders to be considered in contact, even when they aren’t actually in contact. Colliders whose distance is less than the sum of their contactOffset values generate contacts, which causes the collision detection system to predictively enforce the contact constraint even when the objects are slightly separated. Caution: Reducing this value too far can slow down Unity’s ability to calculate continuous polygon collisions. Conversely, increasing the value too much might create artifacts for vertex collisions. |
|
| Simulation Mode | Select when Unity executes the 2D physics simulation. | |
| Fixed Update | Select this to have Unity execute the physics simulation immediately after MonoBehaviour.FixedUpdate is called. | |
| Update | Select this to have Unity execute the physics simulation immediately after MonoBehaviour.Update is called. When you select this mode, additional properties are visible. |
|
| 脚本 | Select this to manually execute the physics simulation via Physics2D.Simulate. | |
| Simulation Layers | Select which layer(s) Unity simulates when Simulation Mode is set to FixedUpdate or Update. The Everything option is selected by default, which automatically selects all layers and includes all of them in the physics simulation. You can select which specific layer(s) to include in the simulation, and Unity will only simulate the Rigidbody2D, joints, effectors, and contacts between Collider2D on those selected layers. |
|
| Queries Hit Triggers | Enable this option if you want Collider 2Ds marked as Triggers to return a hit when any physics query (such as Linecasts or Raycasts) intersects with them. Defaults to enabled. | |
| Queries Start In Colliders | Enable this option if you want physics queries that start inside a Collider 2D to detect the Collider they start in. | |
| Callbacks On Disable | Enable this option to produce collision callbacks when a Collider with contacts is disabled. | |
| Reuse Collision Callbacks | Enable this setting to have the physics system reuse a single Collision2D instance for all collision callbacks. Disable to have the physics system create a new Collision2D instance for each collision callback instead. | |
| Auto Sync Transforms | 启用此选项可自动将变换更改与物理系统同步。 | |
| Gizmos | Select the types of physics 2D gizmos to be drawn within the Editor. You may select multiple options. | |
| Nothing | Select this to deselect every option. No physics 2D gizmo will be drawn. | |
| Everything | Select this to select every option. | |
| All Colliders | Select this to have all Colliders drawn without having to select them in the Hierarchy window. | |
| Colliders Outlined | Select this to have Colliders drawn with an outline (you can customize the outline’s color in 2D Physics Preferences). | |
| Colliders Filled | Select this to have all Colliders drawn using the Fill color specified in the 2D Physics Preferences. | |
| Colliders Sleeping | Select this to have Colliders drawn to show when the Rigidbody 2D they are attached to is sleeping using the Awake or Asleep colors specified in the 2D Physics Preferences. | |
| Collider Contacts | Select this to have Collider contacts shown as a directional arrow that starts at the contact point in the direction of the contact normal. You can specify the Contact color of the arrow in the 2D Physics Preferences. | |
| Collider Bounds | Select this to have Collider bounds drawn for all PhysicsShape2D that a Collider creates. The bounds are an Axis-Aligned Bounding Box (AABB). | |
| Multithreading | Expand this to adjust the multithreading settings. Refer to Multithreading for information about each property. | |
Simulation Mode: Update
The followings properties are visible only when you select Update or Script for the Simulation Mode.

| 属性 | 功能 |
|---|---|
| Use Sub Stepping | Enable this property to have the Editor use simulation sub-stepping during the simulation step. |
| Use Sub Step Count | Enable this property to have the Editor calculate contacts for all simulation sub-steps. This provides a more exact simulation for each sub-step but will reduce performance. Disable this property to only calculate contacts for the first simulation sub-step. |
| Max Sub Step Count | Sets the maximum number of simulation sub-steps allowed per-frame when simulation sub-stepping is enabled and actively running. This will also limit the amount of time the Editor spends on sub-stepping. |
| Min Sub Step FPS | Sets the minimum frames-per-second allowed for a simulation step before the Editor begins to use sub-stepping. When the current frame rate is lower than this value, the Editor will use simulation sub-stepping if Use Sub Stepping is enabled. |
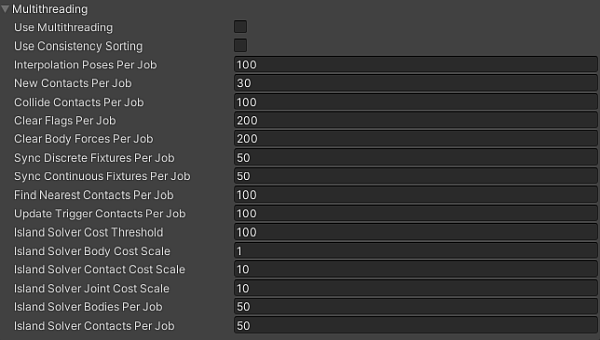
Multithreading
The settings in the Multithreading section allow you to use the C# Job System to configure multithreaded physics.
| 属性 | 功能 |
|---|---|
| Use Multithreading | 启用此选项会使用作业系统执行模拟步骤,并使用这些选项中的其余部分控制如何实现该功能。 |
| Use Consistency Sorting | 如果保持一致的处理顺序对于模拟十分重要,请启用此选项。 在多个 CPU 线程中执行模拟步骤会生成单独的数据批次。处理这些单独的批次会降低处理顺序的确定性,不过会生成更快的结果。 |
| Interpolation Poses Per Job | 设置在每个模拟作业中进行插值的最小 2D 刚体对象数。 |
| New Contacts Per Job | 设置在每个模拟作业中要查找的最小新接触数。 |
| Collide Contacts Per Job | 设置在每个模拟作业中要碰撞的最小接触数。 |
| Clear Flags Per Job | 设置在每个模拟作业中要清除的最小标志数。 |
| Clear Body Forces Per Job | 设置在每个模拟作业中要清除的最小实体数。 |
| Sync Discrete Fixtures Per Job | 设置在每个模拟作业的离散孤岛解算过程中,要在粗筛阶段中同步的最小灯具数。 |
| Sync Continuous Fixtures Per Job | 设置在每个模拟作业的连续孤岛解算过程中,要在粗筛阶段中同步的最小灯具数。 |
| Find Nearest Contacts Per Job | 设置在每个模拟作业中要查找的最小最近接触数。 |
| Update Trigger Contacts Per Job | 设置在每个模拟作业中要更新的最小触发器接触数。 |
| Island Solver Cost Threshold | 设置在离散孤岛解算过程中某个孤岛中所有实体、接触和关节的最小阈值成本。 |
| Island Solver Body Cost Scale | 设置在离散孤岛解算过程中每个实体的成本规模。 |
| Island Solver Contact Cost Scale | 设置在离散孤岛解算过程中每个接触的成本规模。 |
| Island Solver Joint Cost Scale | 设置在离散孤岛解算过程中每个关节的成本规模。 |
| Island Solver Bodies Per Job | 设置在执行孤岛解算时在每个模拟作业中要解算的最小实体数。 |
| Island Solver Contacts Per Job | 设置在执行孤岛解算时在每个模拟作业中要解算的最小接触数。 |
Layer Collision Matrix tab
The Layer Collision Matrix tab settings control whether Colliders (attached to different Rigidbody 2Ds) can come into contact which each other, based on the Layer assigned to the GameObject they are on. The matrix displays each Layer against every other Layer, allowing you to select which specific Layers can come into contact with another.
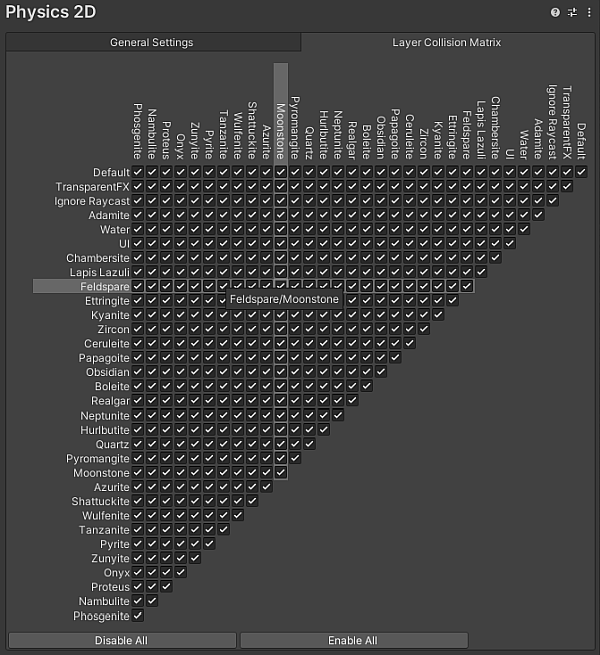
A check mark at the intersection between two Layers indicates that contact is allowed between those two Layers, while a cleared checkbox indicates that contact between those two Layers is never allowed. When you hover over a Layer’s name or a checkbox, its row and column are highlighted to make it easier to see which Layers its affects.
Tip: To optimize for the best possible performance, you should ensure that only the minimum number of potential contacts are selected by only selecting the specific Layers that you want to have contact with others, and disabling all other unnecessary contacts. To help with this, you can select Disable All or Enable All to quickly select or deselect all options at once. and then select the specific Layers.
其他资源
Physics2DManager
Did you find this page useful? Please give it a rating: